


ホーム >
センサ フュージョン >
移動ロボットのための高速障害物トラッキング
移動ロボットのための高速障害物トラッキング
概要
ロボットが周辺環境を適切に認識することは, 安全なオペレーションを実現する要素技術のひとつである. 特に,ロボットの移動領域に物体が侵入したときに, その存在をすばやくかつ確実に検知し,追跡する技術は鍵となる技術であり, 移動ロボットの代表的な例である自動車においても, 安全な自動運転技術や先進運転支援システムの確立に向け, 盛んに研究が進められている. 例えば交差点等における出合い頭衝突事故の回避では, 障害物が視野に入ってから衝突回避行動を取るまでに許される時間が数ミリ秒と非常に短く, 高速な障害物認識技術の開発が重要となる.
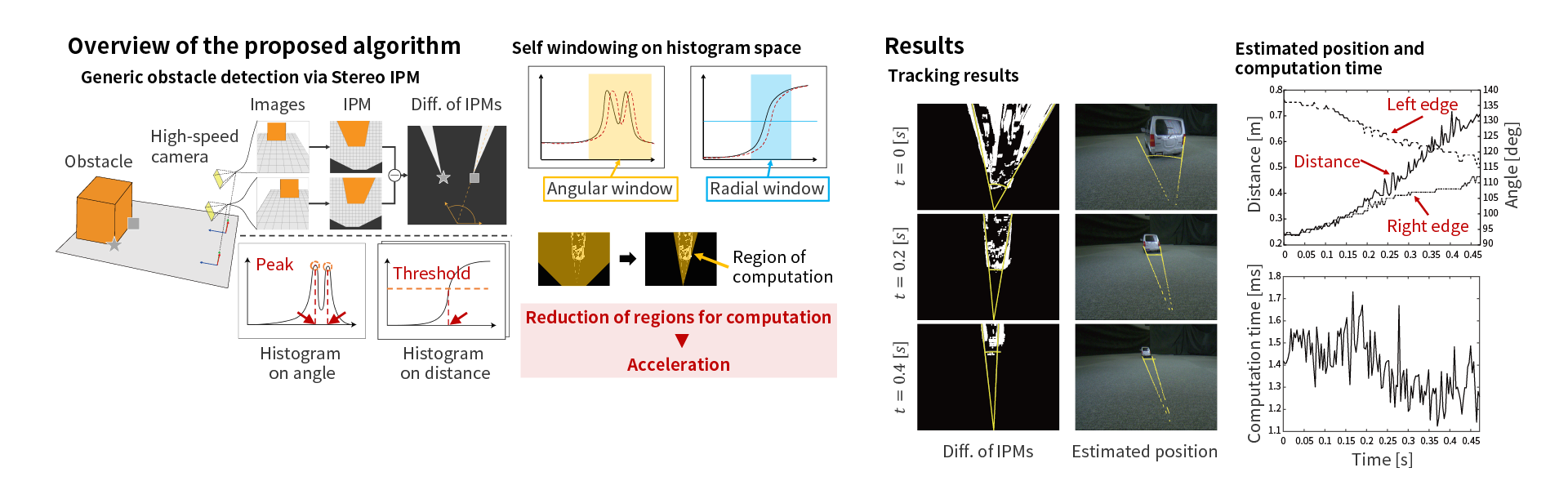
本研究では,高速ビジョンを用いた一般物体の高速トラッキング手法を提案する. 移動ロボットにおける様々な障害物に対応するため,モデルや学習を必要とせずに障害物の検知と障害物までの距離の推定が可能なステレオ逆透視投影法を用い, さらに検知した対象の周辺のみ処理を行うセルフウィンドウ法により高速化を図ることで,500fps以上の高速なトラッキングを実現する手法を提案した.
参考文献
- 平野正浩,海保陽太,妹尾拓,岸則政,石川正俊: ステレオ逆透視投影を用いたセルフウィンドウ法による一般物体の高速トラッキング, 第19回計測自動制御学会システムインテグレーション部門講演会(SI2018) (大阪, 2018.12.15)/講演会論文集, pp.2953-2956 (2018).