


High-Speed Ring Insertion by Dynamic Observable Contact Hand
Summary
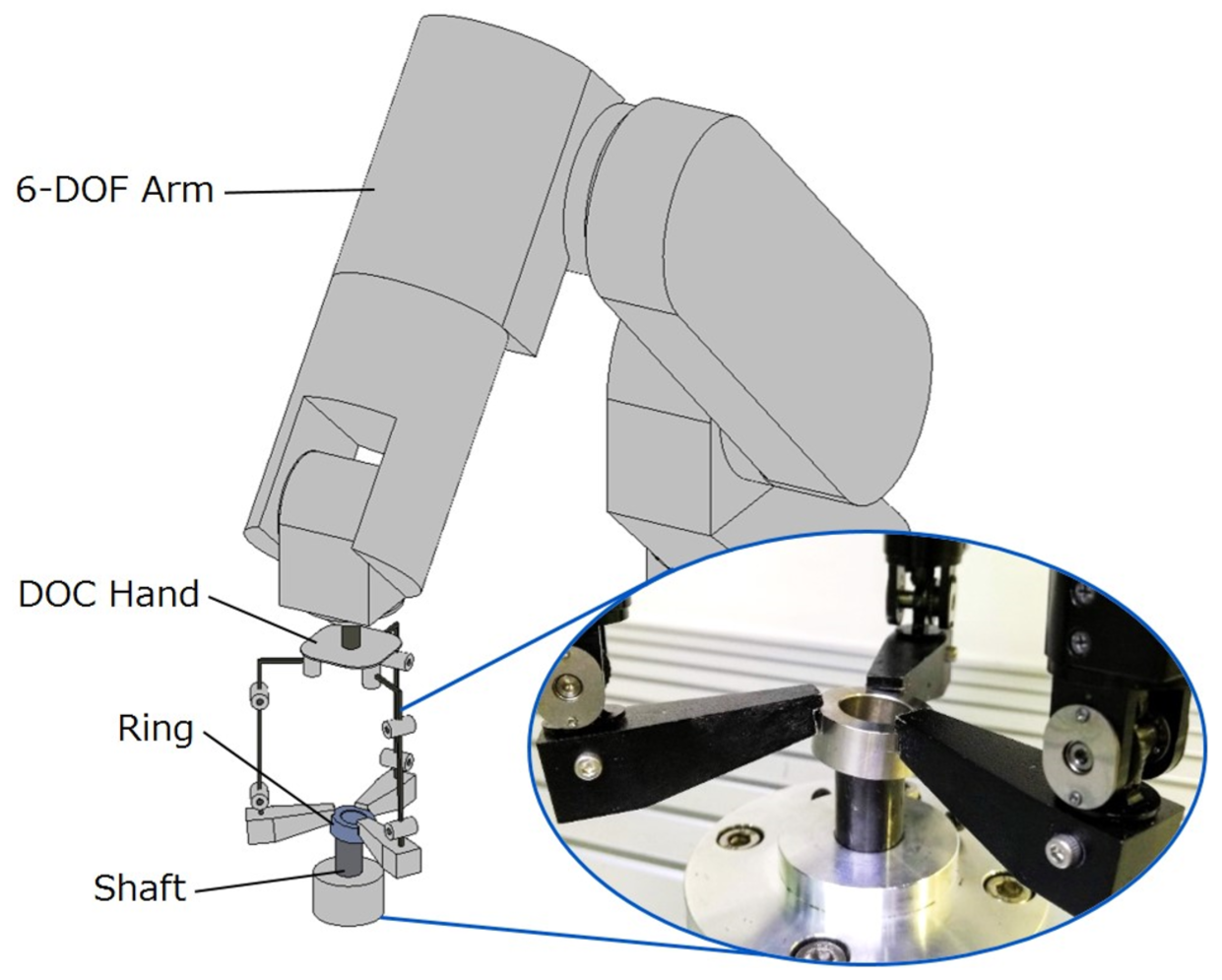
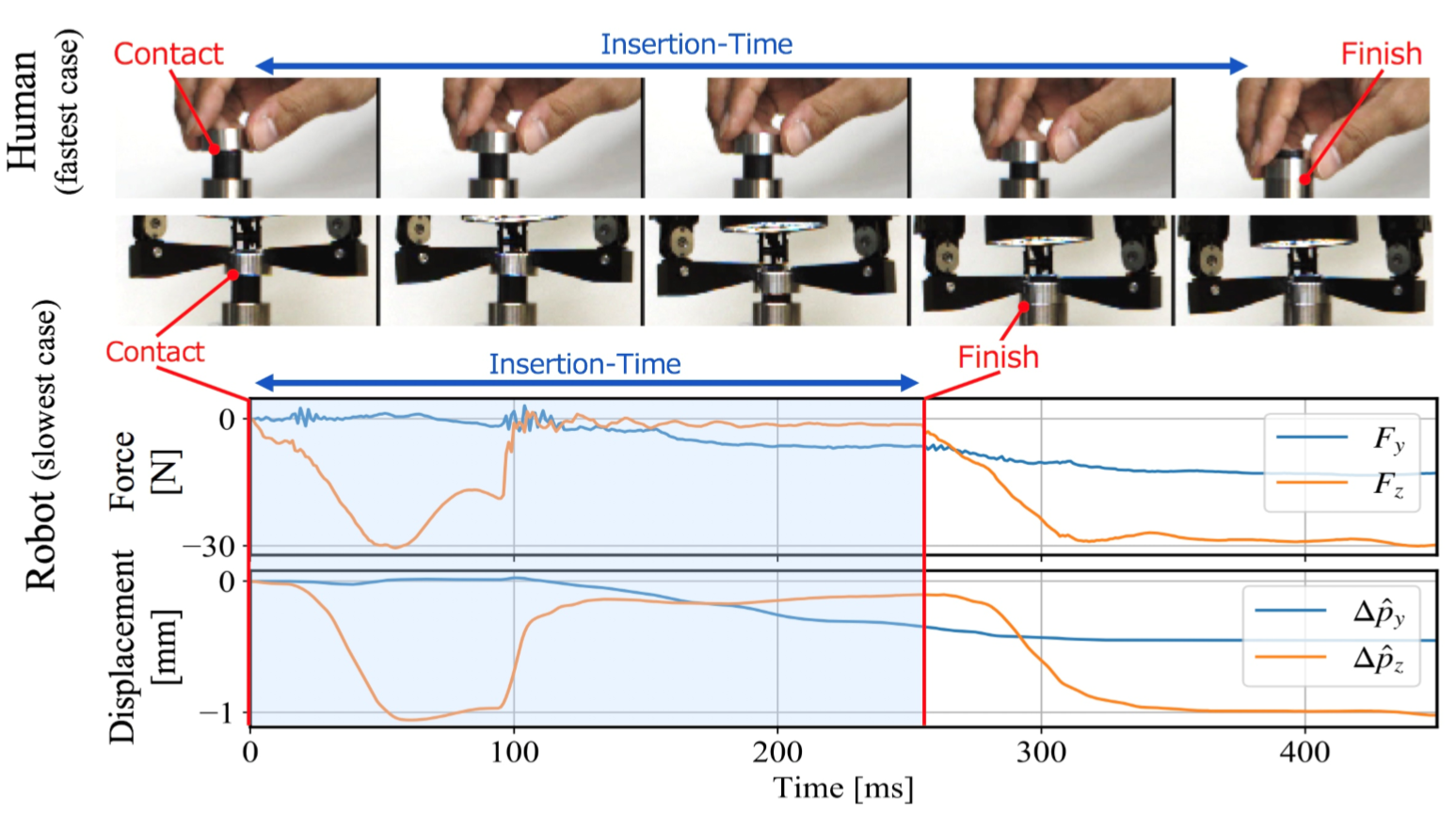
As an application example of "Lightweight High-Speed Multifingered Hand System" which we are developing in this laboratory, we realize high-speed ring insertion into a shaft part. The clearance between parts is 0 to 36 micro-meters (extremely small). Insertion time of a human is 2.58s. On the other hand, our system archived insertion time 2.42s by using new insertion strategy "Dynamic Observable Contact (DOC) hand". In order to reduce the impact force at insertion and correct the position error between the parts, 1ms joint stiffness control of the hand and arm tip speed control are executed simultaneously. DOC hand enables that “6-DOF dynamic passivity”: The grasp system should exhibit passivity with respect to the impact in any direction and “2 Object-pose observability”: The position and orientation of the grasping object should be observed in the grasp system.
This work was conducted by a joint research project between Ishikawa Group Laboratory and OMRON co., ltd.
|
|
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact .
Reference
- Yukihisa Karako, Shinji Kawakami, Keisuke Koyama, Makoto Shimojo, Taku Senoo, Masatoshi Ishikawa: High-Speed Ring Insertion by Dynamic Observable Contact Hand, IEEE International Conference on Robotics and Automation (ICRA2019), (Montreal, Canada, 2019.5.20)/Proceedings, pp., 2019.