Stand Alone High-speed Vision System with Dynamic Capture Control
Summary
There is an increasing need of the vision system allowing high-speed image processing at from hundreds to a thousand fps. With this needs, the importance of the standalone and small high-speed vision start to gamer attention in the various applications such as image sensing from a moving vehicle, measurement of a high-speed-moving target with a mobile device, environment recognition in a wearable sensing style, and so on.
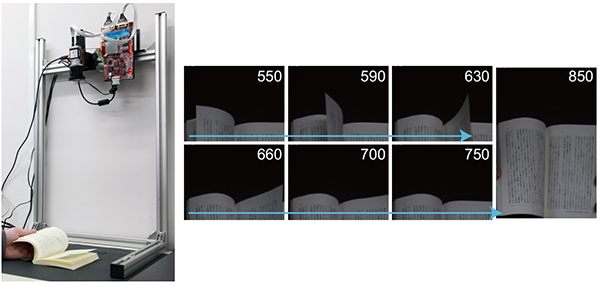
In this research, we develop a standalone high-speed vision system aiming at such application development. Our system introduces dynamic capture control in which the configuration of the capturing is controlled every frames adaptively based on the results of high-speed image processing. This design allows a system to avoid the functional degradation caused by the downsizing. Also we apply this developed system to a high-speed document digitization.