


Home >
System Vision Design > Markerless Dynamic Projection Mapping using High-speed 6-DoF Tracking
Markerless Dynamic Projection Mapping using High-speed 6-DoF Tracking
Summary
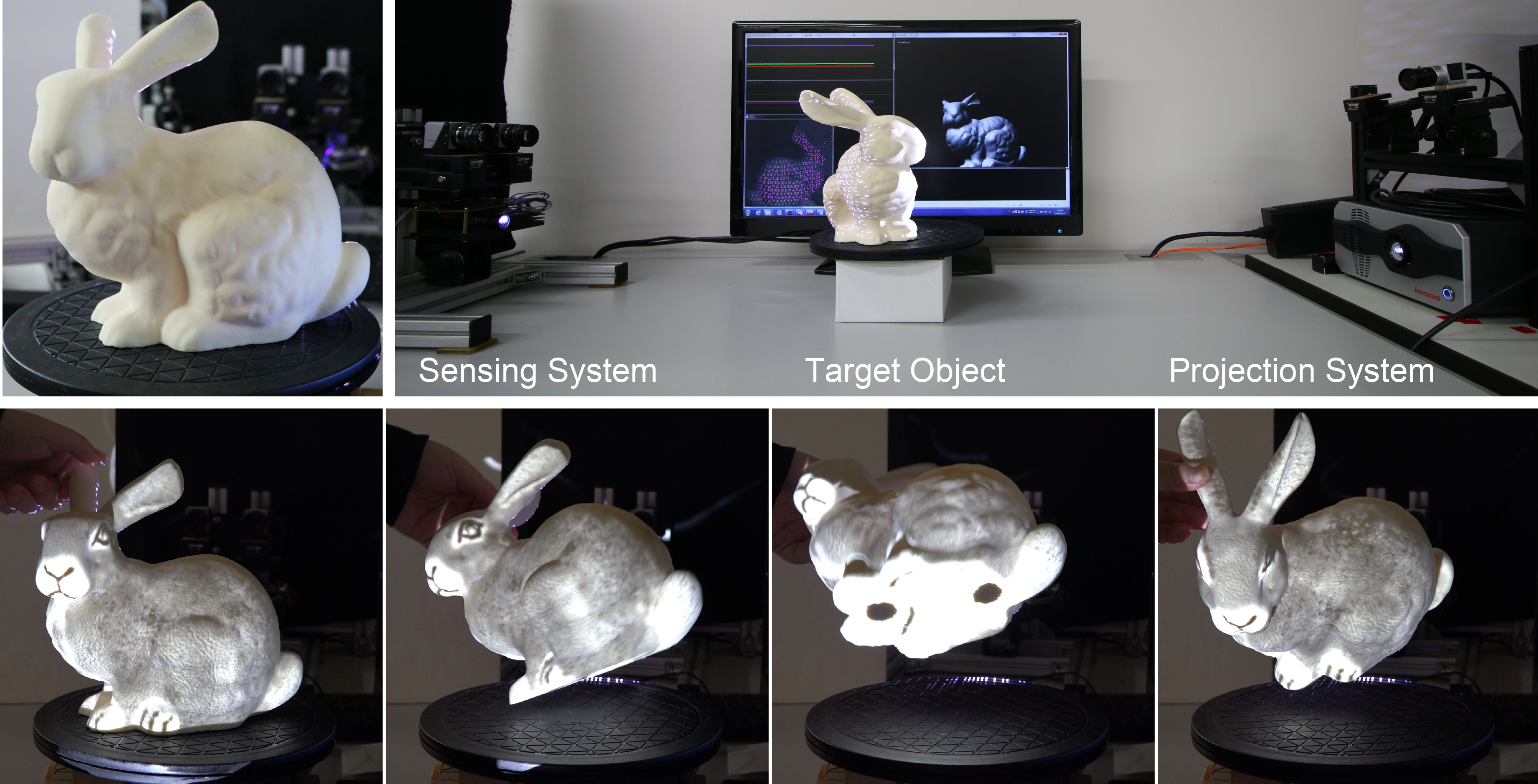
In recent years, various dynamic projection mapping have been achieved. However, in order to acquire the absolute position and orientation at 1,000 fps level, it was necessary to attach markers to the object.
We propose a markerless method to achieve both high speed and absolute position and orientation estimation by combining relative motion estimation at 1,000 fps level with our fast three-dimensional tracking method and correction by model-based registration method. In this research, we report the results of absolute position and orientation estimation at high speed by the proposed method and the results of markerless dynamic projection mapping at 1,000 fps using DynaFlash.
References
-
Satoshi Tabata, Hikaru Amano, Yoshihiro Watanabe, Masatoshi Ishikawa, "Markerless Dynamic Projection Mapping using High-speed 6-DoF Tracking,"
The Institute of Electronics, Information and Communication Engineers, PRMU2017-130/Technical report of IEICE, vol. 117, no.391, pp. 147-152, Jan. 2018.