Home >
System Vision Design > High-speed Depth-normal Measurement and Fusion Based on Multiband Sensing and Block Parallelization
High-speed Depth-normal Measurement and Fusion Based on Multiband Sensing and Block Parallelization
Summary
A wide range of research areas have high expectations for the technology to measure 3D shapes, and to reconstruct the shape of a target object in detail.
In this study, we consider a high-speed shape measurement technology that realizes accurate measurements in dynamic scenes.
We propose a measurement method that sacrifices neither measurement density nor accuracy while realizing high speed.
Many conventional 3D shape measurement systems employ only depth information to reconstruct a shape, which makes it difficult to capture the irregularities of an object's surface in detail.
Meanwhile, methods that measure the surface normal to capture 3D shapes can reconstruct high-frequency components, although lowfrequency components tend to include integration errors.
Thus, depth information and surface normal information have a complementary relationship in 3D shape measurements.
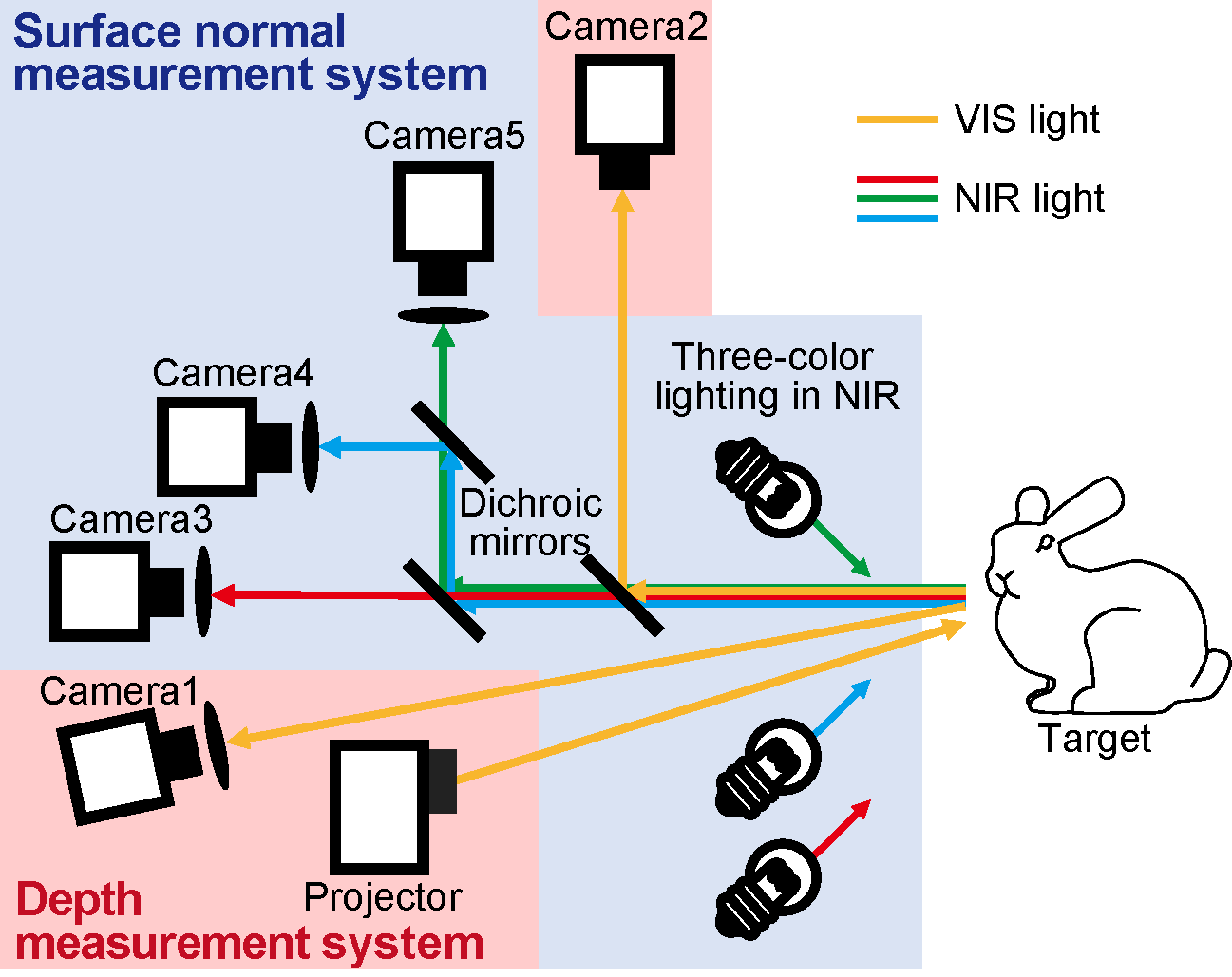
This study proposes a novel optical system that simultaneously measures the depth and normal information at high speed by waveband separation as shown in Fig.1, 2, and a method that reconstructs
the high-density, high-accuracy 3D shape at high speed from the two obtained data types by block division.
The results confirm that the high-speed measurement was conducted at 400 fps with pixel-wise measurement density, and a measurement accuracy with an average error of 1.61 mm (Fig.3-5).
 |
 |
| Fig.1 Optical system for high-speed depth-normal measurement |
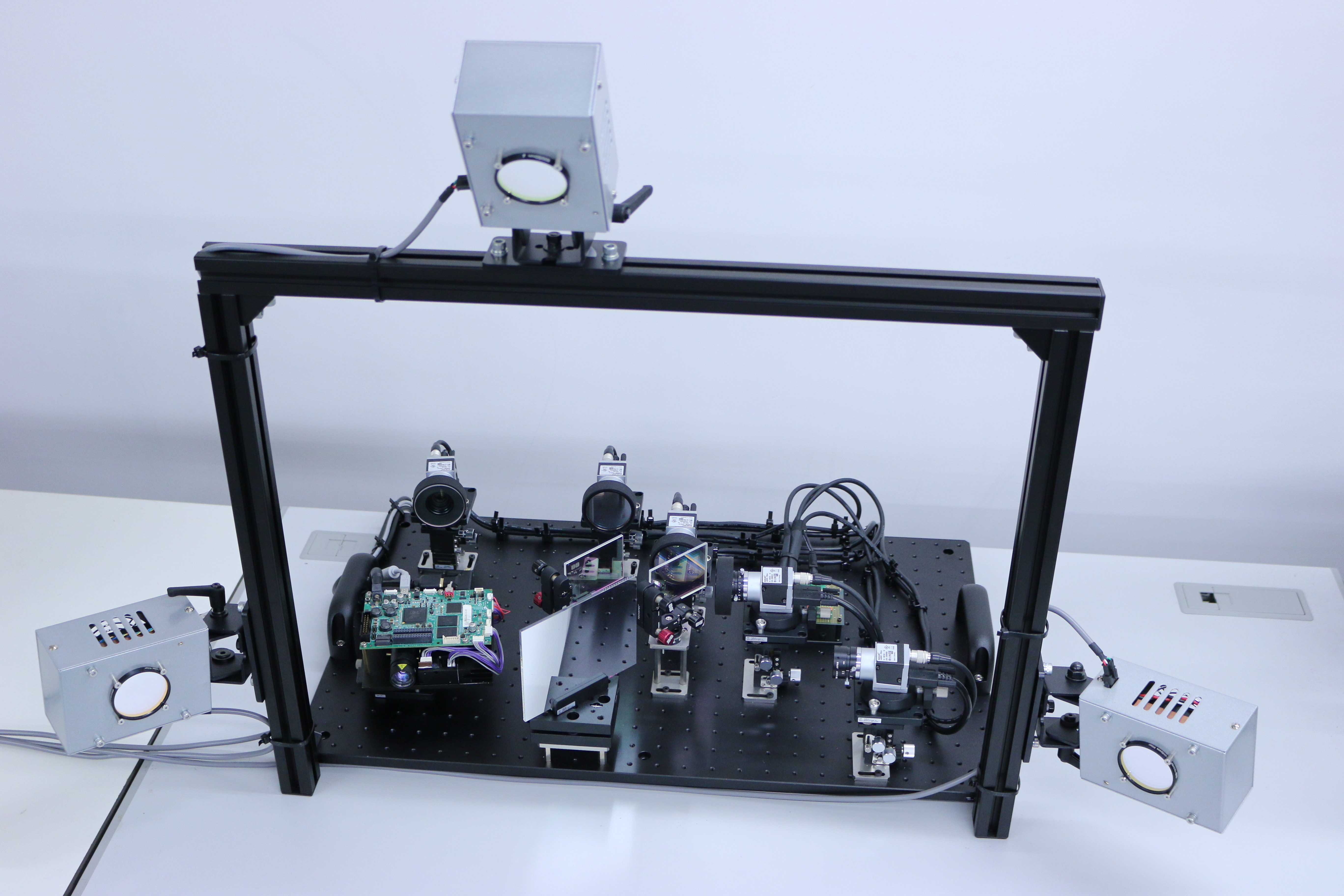
Fig.2 Actual system |
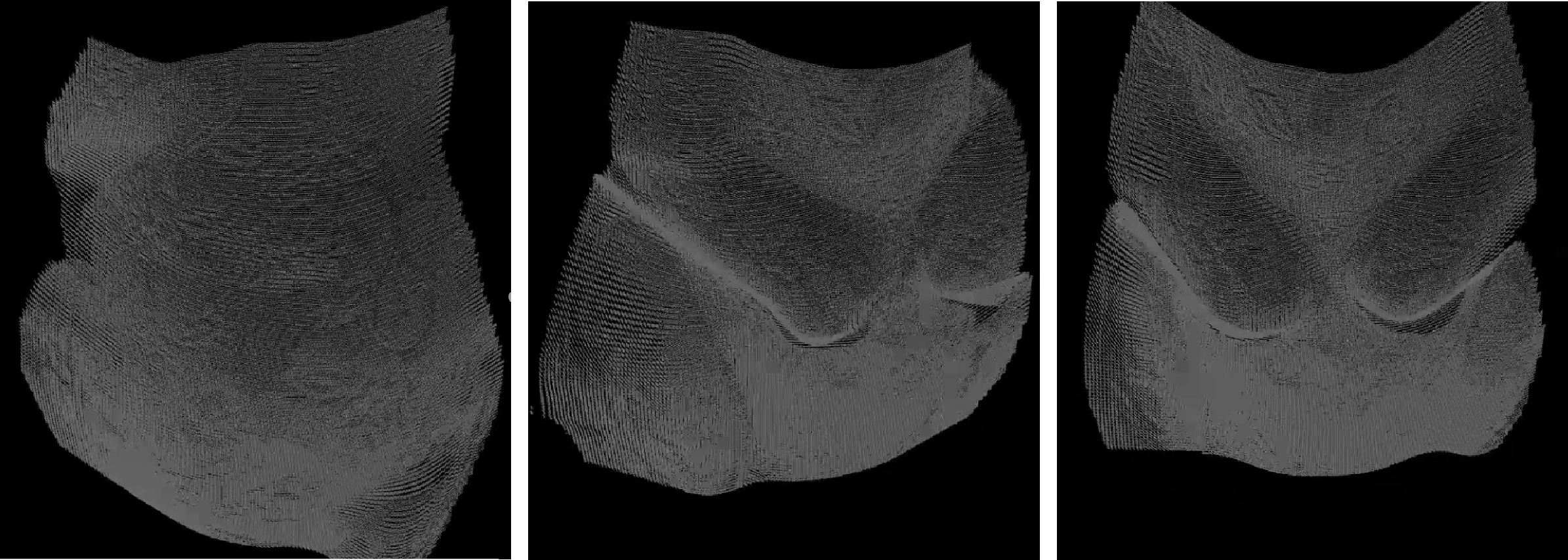 |
| Fig.3 Measured point clouds of a moving target |
 |
 |
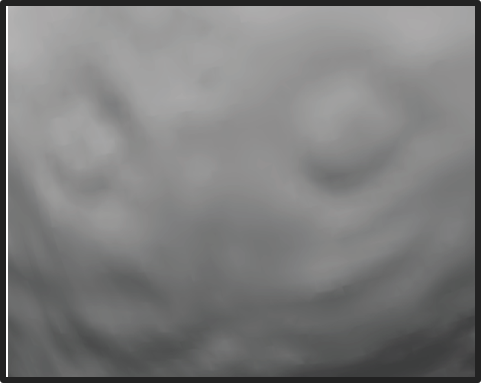
| Fig.4 Depth measurement by a commercial system |
Fig.5 Depth-normal fusion by the proposed system |
References
- Leo Miyashita, Yohta Kimura, Satoshi Tabata, Masatoshi Ishikawa: High-speed simultaneous measurement of depth and normal for real-time 3D reconstruction, SPIE Optical Engineering + Applications, Oral, 11842-52, San Diego, California, USA (hybrid with virtual conference), 1-5 Aug. (2021)
- Leo Miyashita, Yohta Kimura, Satoshi Tabata, Masatoshi Ishikawa: High-speed Depth-normal Measurement and Fusion Based on Multiband Sensing and Block Parallelization, Journal of Robotics and Mechatronics (JRM), Vol.34, No.5, pp.1111-1121 (2022)


