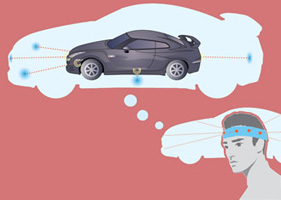
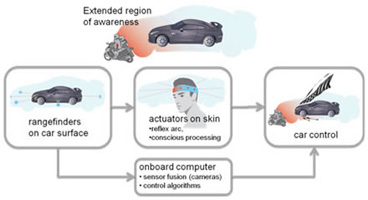
This research extends and complements the Haptic Radar project. The goal of the Haptic Radar was to augment an individual spatial awareness through a set of invisible, sensitive "light hairs" that extended the body outwards, and into regions not directly not covered by the eyes. The HaptiKar experiment consist on placing the sensors over the surface of a car, while mantaining the actuators over the body of the driver. This way, the driver would feel the surrounding of the car: obstacles on the car blind spots, proximity of the cars behind as "annoying" pressure on the back of the head, etc. The figure on the right represents some new sensory-motors loops emerging on the haptic-radar car configuration: rangefinders over the surface of the car are used to sense obstacles, and this information is used to automatically steer the car when necessary (lower path in the diagram) and also to activate small motor vibrators placed around the head of the driver - which in turn can control the car through a remote control (upper path of the diagram). |