


Dynamics Model of Paramecium Galvanotaxis for Microrobotic Application
Summary
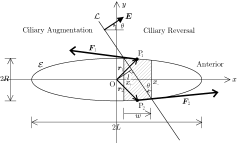
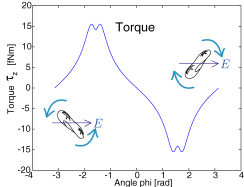
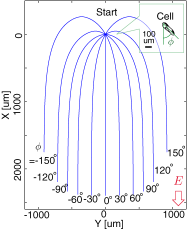
We propose a qualitative physical model of galvanotaxis of Paramecium cells using a bottom-up approach to link the microscopic ciliary motion and the macroscopic behavior of the cells. From the characteristic pattern of ciliary motion called the Ludloff phenomenon, the torque that orients the cell toward the cathode is derived mathematically. Dynamical equations of motion are derived and their stability is discussed. In numerical simulations using our model, cells exhibit realistic behavior, such as U-turns, like real cells.
References
- Naoko Ogawa, Hiromasa Oku, Koichi Hashimoto and Masatoshi Ishikawa. A physical model for galvanotaxis of Paramecium cell. Journal of Theoretical Biology, Vol.242, Issue 2, pp.314-328, Sept. 2006. [PDF (484K)] [doi:10.1016/j.jtbi.2006.02.021] *Elsevier
- Naoko Ogawa, Hiromasa Oku, Koichi Hashimoto and Masatoshi Ishikawa. Dynamics Model of Paramecium Galvanotaxis for Microrobotic Application. 2005 IEEE International Conference on Robotics and Automation (ICRA 2005) (Barcelona, Spain, 2005.4.19) / Proceedings, pp. 1258-1263, Apr. 2005. [PDF (341K)] *IEEE
Corresponding author: Naoko Ogawa
(Naoko_Ogawa )
)