


Fractal-based camera calibration pattern
Summary
Camera-based 3D measurement and Augmented Reality (AR) systems need camera calibration in advance, which often use a planar pattern as a calibration tool. Calibration patterns with availability of several camera zoom levels is preferable for various scenes, but general patterns such as a checkerboard cannot cope with scalability and partial visibility. In other words, square or circular markers at a certain size cannot provide observations at sufficient resolution and unique position detection at both low and high zoom levels.
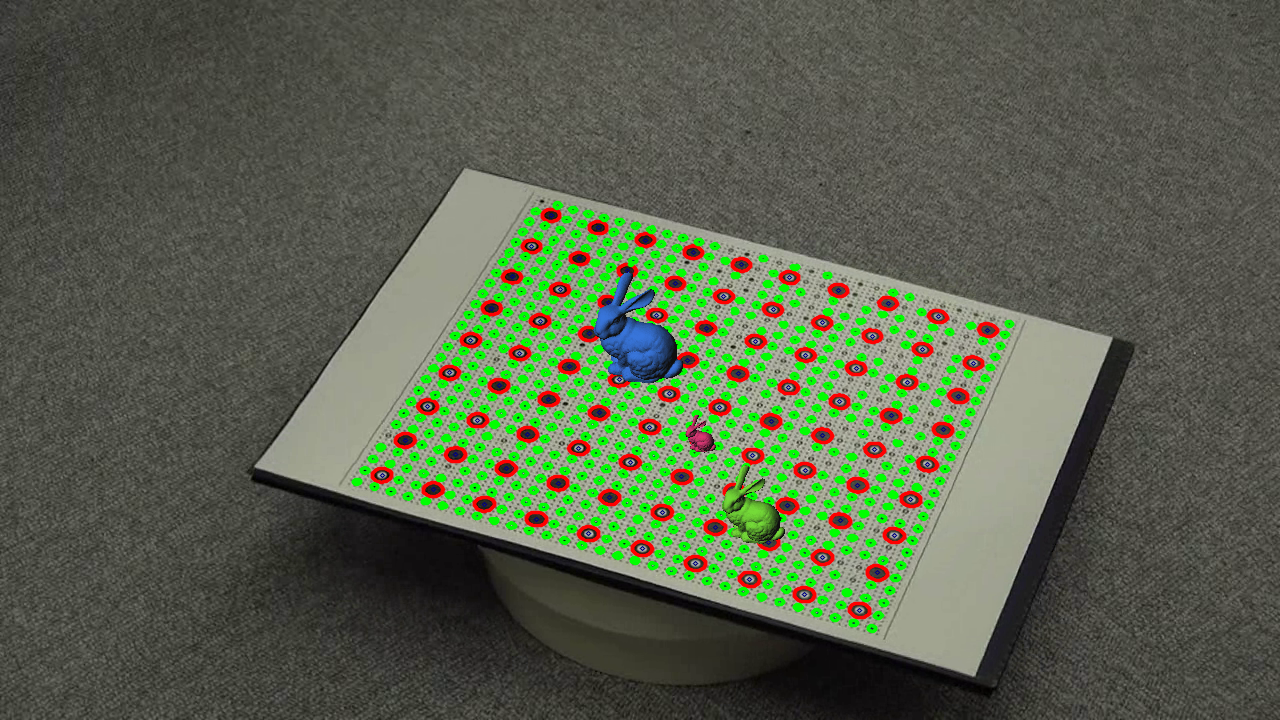
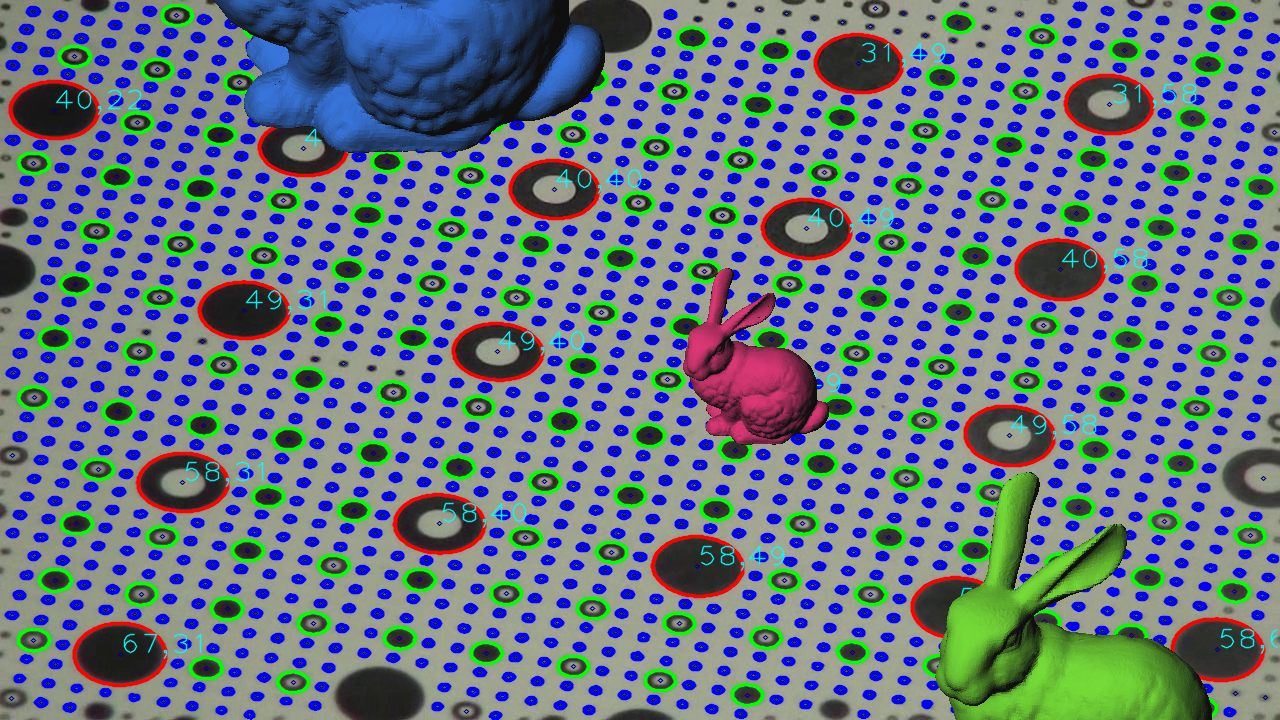
We propose a fractal-based calibration pattern, which has self-similarity for different zoom levels. The fractal structure of the pattern is based on Sierpinski carpet, which is a common fractal figure. We convert its squares for higher precision detection, and embed binary information with circles or rings with M-array for unique position detection. As one applicational example, we design the fractal pattern with 3 levels (Fig. 1), and show its performance as AR marker field at both low and high zoom levels (Fig. 2, 3). The calibration pattern with fractal structure and appropriate code information can increase flexibility of system configuration of multi-camera systems for 3D measurement and AR, and leads various applications.
 |
 |
 |
Reference
- Tomohiro Sueishi, and Masatoshi Ishikawa: Circle Grid Fractal Pattern for Calibration at Different Camera Zoom Levels, 8th ACM SIGGRAPH Conference and Exhibition on Computer Graphics and Interactive Techniques in Asia (SIGGRAPH ASIA 2015) (Kobe, 2015.11.2-5)/Poster, Article No.21