


Home >
Sensor Fusion >
High-Speed, Non-deformation Catching of a marshmallow with High-speed Vision and Proximity Sensor
High-Speed, Non-deformation Catching of a Marshmallow with High-speed Vision and Proximity Sensor
Summary
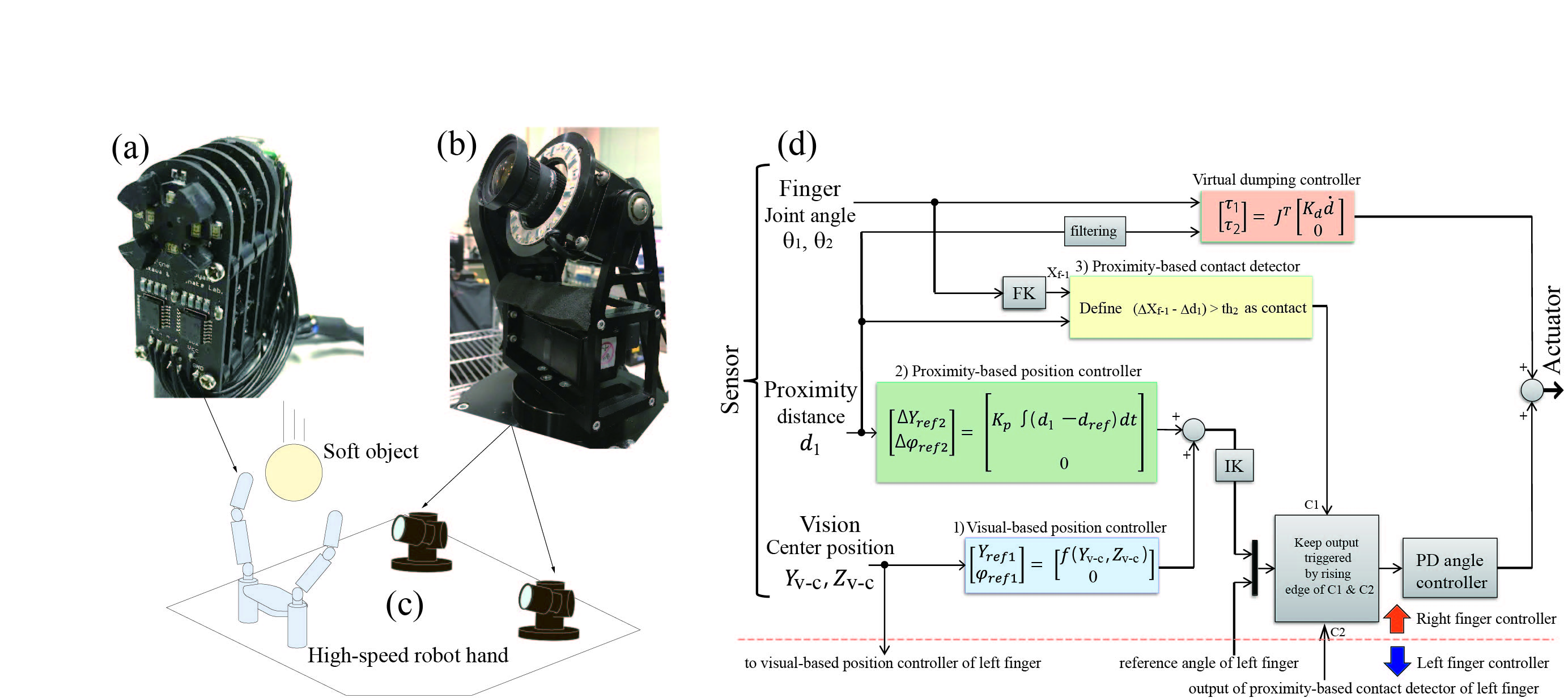
We developed the 1ms sensor fusion system with the high-speed active vision sensor and the high-speed, high-precision proximity sensor. The control algorithm of the high-speed robot hand became simple and robust by the combination of the sensor feedbacks, because the combination of the feedbacks enabled continuous sensing from non-contact to contact state with high-resolution without visual occlusion. Since the contact was detected based on the distance value of the proximity sensor, the hand could control fingertip position without depending on the contact force. The hand could stop the fingertip motion before deforming the sof object (marshmallow).
The feedback control makes it possible to grasp sodt objects with unknown characteristics at high speed and non-deformation.
Therefore, the control can be applied to manufacturing lines of soft foods.
Especially, it can be expected to be applied to processes including multiple works
such as "assembly of boxes", "grasping of cakes" and "packaging of boxes".
|
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact .
Reference
- Keisuke Koyama, Kenichi Murakami, Taku Senoo, Makoto Shimojo, Masatoshi Ishikawa: High-Speed High-Precision Proximity Sensor Subsuming Tactile Function -Visual and proximity control for catching fast without deforming soft objects-, 2018 Robotics Society Japan Conference, 1G3-H04 (2018) (Japanese).