


Home >
Sensor Fusion > Elasto-plastic Deformation Control
of a Multijoint Manipulator
Elasto-plastic Deformation Control of a Multijoint Manipulator
Summary
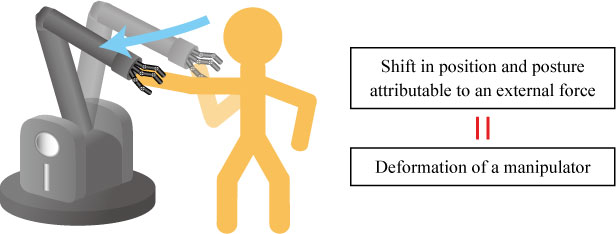
In this study, a deformation control for generating passive response to an external force is designed and implemented. This control strategy treats the shift in position and posture attributable to an external force as the deformation of the robot. The deformation dynamics are constructed from the deformation models, which include plastic and elastic behavior. Next, control methods are proposed to passively achieve deformation characteristics. Physical simulations with a robotic arm are executed to validate the proposed control law.
The single part of plastic deformation control based on the concept can also be seen here.
Movie
Reference
- Taku Senoo, Gaku Jinnai, Kenichi Murakami and Masatoshi Ishikawa: Deformation Control of a Multijoint Manipulator Based on Maxwell and Voigt Models, 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, (Daejeon, Korea, 2016.10.12) / Proceedings, pp. 2711-2716, 2016.