


Self-localization using Tunnel Lighting Recognition
Summary
Our group proposes a tunnel inspection device that can be equipped with commonly used road patrol vehicles. This device enables efficient inspection of tunnel walls during routine patrols, ensuring that the intended areas are captured accurately. To achieve this, our study focuses on developing a self-localization system that utilizes tunnel lighting recognition to control the capture angle in real-time, eliminating the need for calibration.
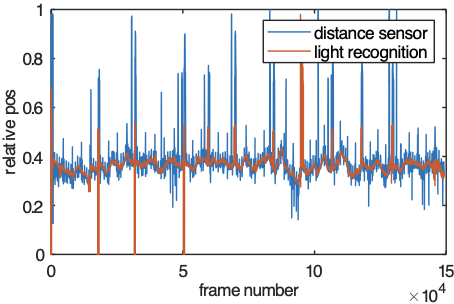
White line recognition is a self-localization method commonly used in Intelligent Transport Systems, including autonomous driving. However, the tunnel lighting can also be used as a stable feature for self-localization instead of white lines. In this study, we propose a method based on visional capture to achieve stable and real-time self-localization using the tunnel lighting. The tunnel lights are arranged in a straight line on the top walls of the tunnel at a constant height, making them almost straight from the inspection vehicle's viewpoint. Therefore, we consider two straight lines as equivalent to white lines and apply the same method used in white line recognition. The accuracy of our self-localization results was evaluated by comparing them to the distances measured by a horizontally tilted inspection device's ranging sensor at three different stopping locations. Our self-localization results have an error in the range of a few centimeters, while the horizontal capture area of the inspection camera at a distance of 5 meters is 52.8 cm. However, it's worth noting that the error is higher in the emergency parking zone of the tunnel, where two lines of lighting are present on one side.
 |
 |
References
- Yushi Moko, Yuka Hiruma, Tomohiko Hayakawak, Yoshimasa Onishi, Masatoshi Ishikawa: High-Speed Localization Estimation Method Using Lighting Recognition in Tunnels, 2023 7th International Conference on Intelligent Traffic and Transportation(ICITT 2023) (Madrid,2023.9.19), ML755:1-ML755:12 (2023).