


Microscopic Visual Feedback (MVF) System
Summary
With the rapid development of micro technology, it becomes more important to handle micro objects such as LSIs and cells. For human beings, however, handling micro objects through micro scope is very difficult. To solve this problem and realize automatization of manipulation of micro objects, we proposed MVF (Micro Visual Feedback). MVF is a technique that uses High-Speed Vision as a sensor to control micro objects. It has three advantages: high precision, high-speed, and no physical contact. By using MVF, systems can automatically control micro objects.
MVF system
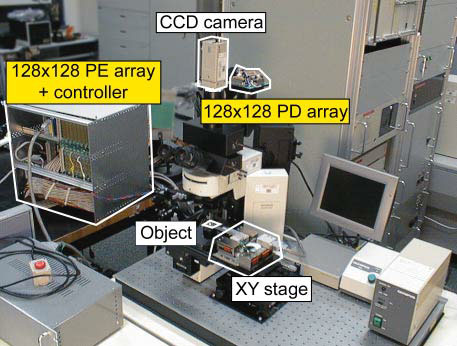
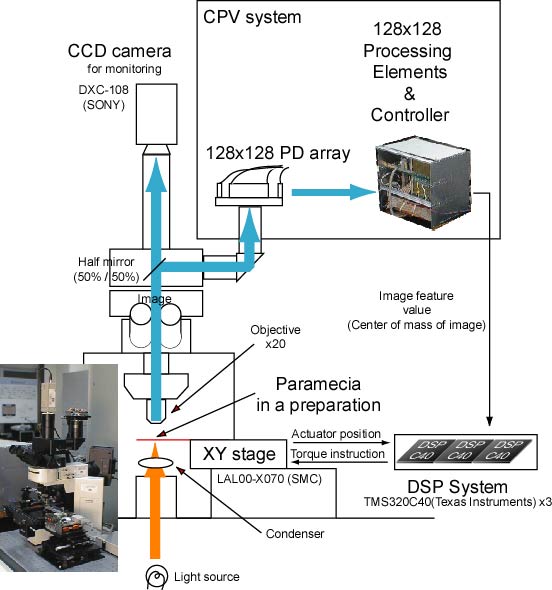
Developed MVF system is designed to control the position of micro objects in field of view. Components are Column Parallel Vision (CPV) system, microscope, XY stage with two computer controlled linear actuators, and DSP system.
CPV system watches a magnified image of micro objects through the microscope. CPV system captures and processes the image and output image feature values to DSP system in 1.28[ms] par frame. DSP system output torque instructions to actuators which were calculated from the image feature value.
Results
- Results of current system
- Results of old system
Tracking of motile microorganisms
When observing motile microorganisms, objects swim out of field of view very quickly. This phenomena hindes the observer from observing one microorganism continuously for a long time. This problem is solved by using MVF to track the object within the field of view. Visually tracking a paramecium experiment was done. As a result, MVF system could track a paramecium continuously.
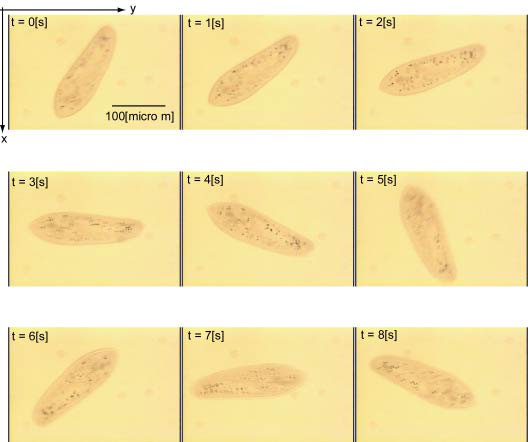
Photos captured by CCD camera for monitoring and trajectory of a paramecium are shown. The trajectory of a paramecium is calculated from both the position of the XY stage and the position of the paramecium in the image.
Vibration control of micro beam
In this experiment, MVF system controlled micro beam vibration to stop using high-speed visual feedback.
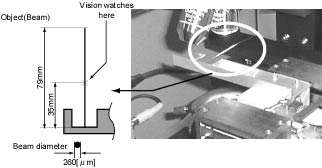
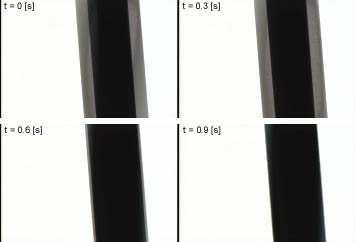
The object's first order characteristic frequency was about 21[Hz]. Results show that the developed system succeeded to control the object and stopped it's vibration.
Line search

In this experiment, MVF system searches and finds a line using only high-speed visual feedback. Once a line found, the system tracks a line for 200[ms], and move to search another line. The result shows that the system can visually search and find a line automatically.
Video
Reference
- Hiromasa OKU, Idaku ISHII, and Masatoshi ISHIKAWA: Tracking a Protozoon Using High-Speed Visual Feedback, Proc. of 1st Annual Int. IEEE-EMBS Special Topic Conf. on Microtechnologies in Medicine & Biology (Lyon, France, Oct. 12-14, 2000).