


High-speed Obstacle Tracking for Mobile Robots
Summary
Fast Recognition of the surrounding environment is a central topic for mobile robots. Detection and tracking of obstacles at an earlier stage contribute to safer operations. For instance, in intelligent transportation systems, collision avoidance at intersections with poor visibility requires very high responsiveness. Time for performing an appropriate maneuver is reportedly only a few milliseconds.
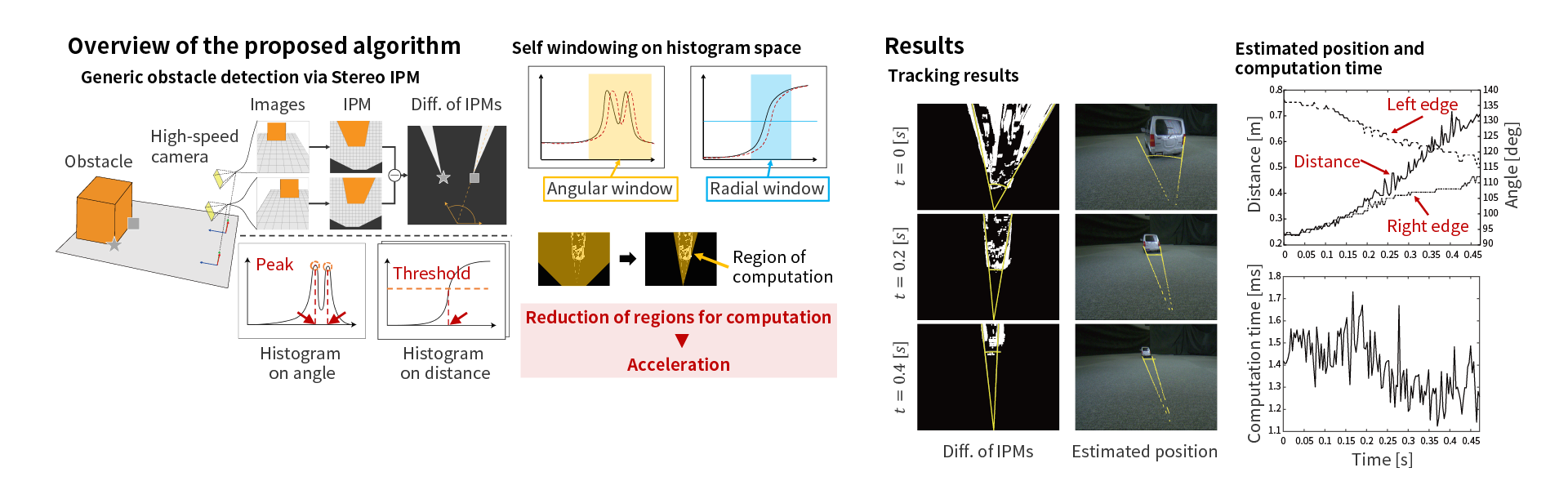
In this study, we propose a high-speed tracking technique of generic obstacles on the ground surface using stereo high-speed vision. Obstacles are detected by stereo inverse perspective mapping (stereo IPM) as illustrated in the figure below and then tracked at high speed by exploiting the traits of high-speed vision — a huge computational load reduction by the self-windowing method applied to the histogram spaces. Experiments using RC car demonstrated over 500 fps real-time tracking.
Reference
- Masahiro Hirano, Yota Kaiho, Taku Senoo, Norimasa Kishi, Masatoshi Ishikawa: High-speed Generic Obstacle Tracking via Stereo IPM with Self Windowing, 19th SICE System Integration Division Annual Conference(SI2018) (Osaka, Japan, 2018.12.15)/Proceedings, pp.2953-2956 (2018).