


Home >
Sensor Fusion >
Soft Catching with a soft finger
Soft Catching with a soft finger
Summary
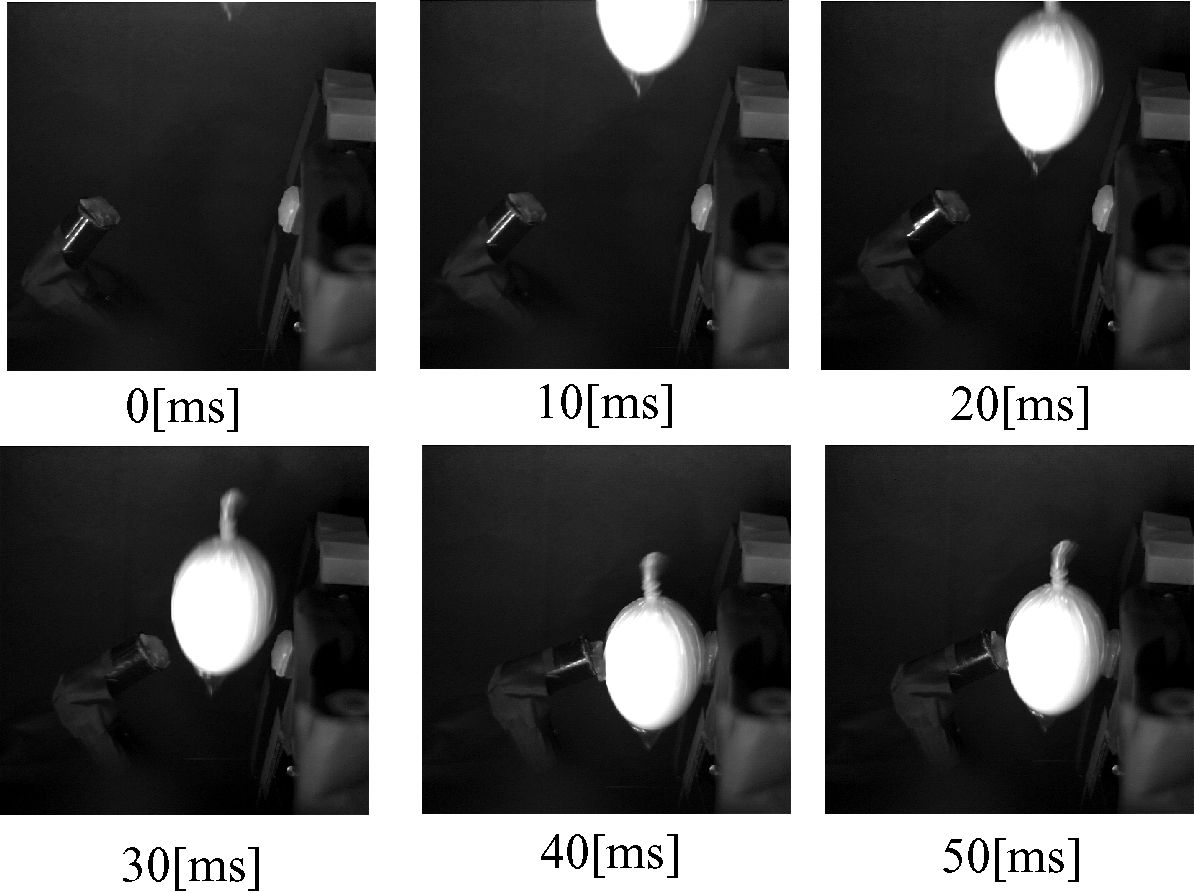
Using a high-speed multifingered hand, which can move at 180[deg]/0.1[s], a high-speed catching of a falling ball was achieved. However it was impossible to catch a fragile object, because a collision made a large impact with it. In this paper, a high-speed catching of a fragile object, like an egg, is achieved, using a high-speed hand with a gel fingertip and using shock absorption of gel in combination with visual feedback control.
Movie
1.0 times speed
0.002 times speed
References
- Yoshio Ugai, Masahiko Onishi, Akio Namiki and Masatoshi Ishikawa: Soft catching using high-speed vision and soft fingertips, 5th SICE System Integration Division Annual Conference (SI2004), pp. 1146-1147 (2004)
- Masahiko Onishi, Akio Namiki, Koichi Hashimoto and Masatoshi Ishikawa: Robotic Catching Using a High-speed Hand with soft fingertips, 2004 JSME Conference on Robotics and Mechatronics (2004)