


High-speed RGB-D sensing based on a parallel-bus pattern
Summary
There is high demand for simultaneous measurement of 3D shape (depth) and color information (RGB), but conventional RGB-D measurement systems have suffered from limitations. Methods combining multiple sensors for RGB-D measurement not only tend to cause misalignment between shape and color data, but also suffer from high system costs due to multiple sensors and computational load from integrated processing. Furthermore, even when achieving RGB-D measurement with a single sensor using time-division multiplexing, spatiotemporal misalignment occurs when measuring dynamic objects.
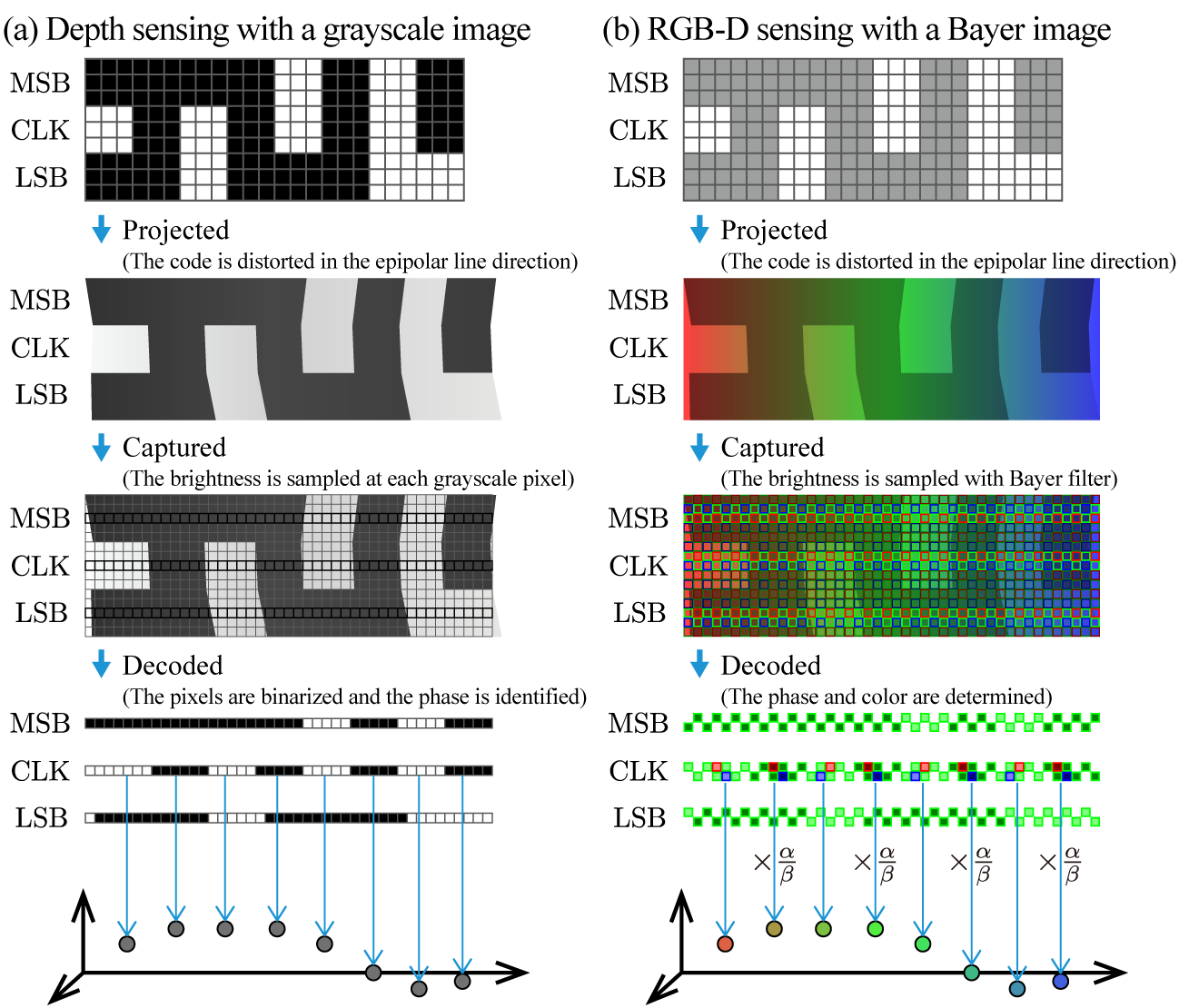
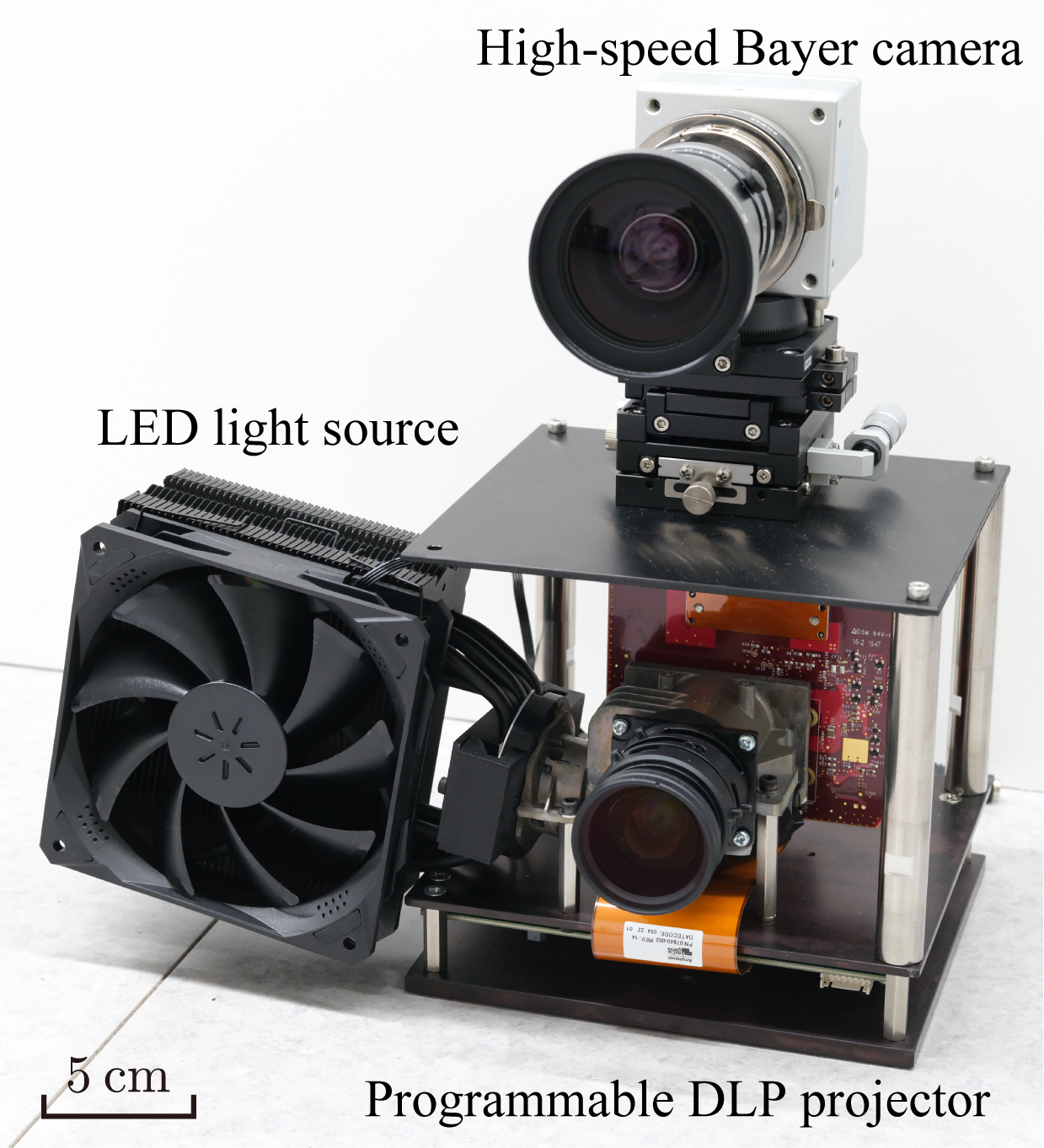
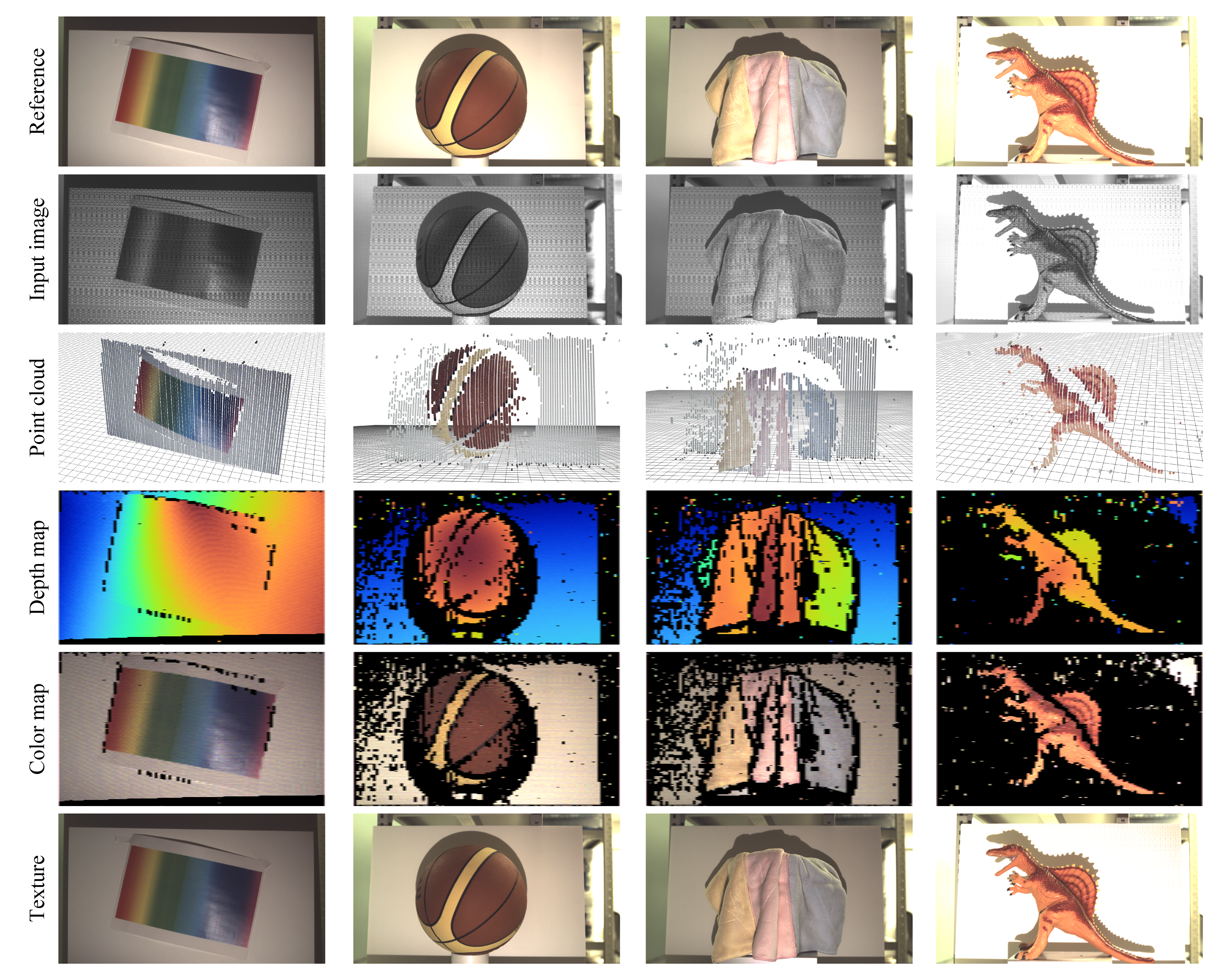
This research developed a novel method for simultaneously acquiring 3D shape and color information by applying a one-shot structured light technique using a parallel-bus pattern, which enables high-speed, low-latency 3D measurement. Our approach leverages the structural characteristics of the method. This method measures RGB-D information from a single frame captured by a single camera, thereby fundamentally eliminating spatio-temporal misalignment while simultaneously reducing hardware costs. Furthermore, since measuring color information does not require de-beying processing of the entire image, it promises high-speed, low-latency measurement with reduced computational cost, similar to the underlying 3D measurement technology. Experiments achieved approximately 22,000 colored 3D points in about 0.3ms computation time, realizing 1,000fps RGB-D measurement. Given its high real-time performance, this method is expected to be utilized for digitizing dynamic scenes involving rapid motion.
References
- Leo Miyashita and Masatoshi Ishikawa: Simultaneous measurement of color and depth images at 1,000 fps based on a parallel-bus pattern, SPIE Optics+Optoelectronics, Real-time Processing of Image, Depth and Video Information 2025, Oral, 13526-13, Prague, Czech Republic, 7-10 Apr. (2025)