
Home > MVF
 for print
for print Microscopic Visual Feedback
Concept
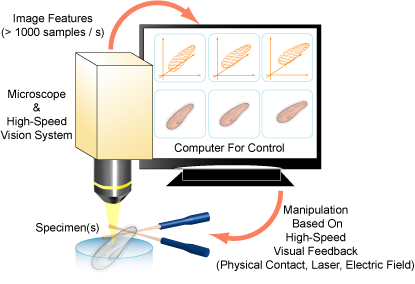
With the rapid development of micro technology, it becomes more important to handle micro objects such as Micro-Electro-Mechanical Systems (MEMS) and cells. For human beings, however, handling micro objects through microscope is very difficult. To solve this problem and realize automatization of manipulation of micro objects, we proposed MVF (Micro Visual Feedback). MVF is a technique that uses High-Speed Vision as a sensor to control micro objects. It has three advantages: high precision, high-speed, and no physical contact. By using MVF, systems can automatically control micro objects.
Research
System
- High-Speed Tracking of Ascidian Spermatozoa (2007-)
- Mobile Microscope System (2006-)
- Three-dimensional tracking of a motile microorganism (2004-)
- Single-Cell Level Continuous Observation System for Microorganism Galvanotaxis (2003-)
- Microorganism Tracking Sytem (1999-)
- Microscopic Visual Feedback System (1996-)
Device
- Rapid Liquid Lens (2005-)
- Variable-Focus Lens with 1-kHz bandwidth (2001-2005)
- Vision Chip (Vision Chip Project)
- Column Parallel Vision (CPV) System
Algorithm
- High-Speed Auto-Focusing of A Cell (2003-)
- High-Speed Snake Algorithm For Tracking A Microorganism (2003)
- High-Speed Target Tracking using Self Windowing
Organized Bio-Modules (OBM)
- Visualization and Decoding of External Stimuli Perceived by Living Microorganisms (2006-)
- Nonholonomic Properties in Paramecium Galvanotaxis and Path Planning of Paramecium Cells (2005-)
- Dynamics Model of Paramecium Galvanotaxis for Microrobotic Application (2004-)
- A Current-Based Electrostimulation Device for the Motion Control of Paramecium Cells (2003-)
- Microrobotic Visual Control of Motile Cells using High-Speed Tracking System (2003-)
- Organized Bio-Modules (OBM) using Microorganisms (2002-)