


Motion Control of Microorganism in 3-D Space using High-Speed Tracking
Summary
We propose a new framework and novel visual control system for motile cells in three-dimensional (3-D) space
Our goal is to utilize microorganisms as micro-robots in various applications by exploiting galvanotaxis (locomotor response to electrical stimulus) to actuate them. This requires automated motion control of swimming cells in 3-D space; in contrast, our previous work has been limited to 1-D or 2-D motion control on the focal plane.
The system is capable of 3-D tracking and control of swimming cells by utilizing a high-speed vision system. A combination of ``lock-on'' tracking within the focal plane and automated focusing using a Depth-From-Diffraction method executed at 1-kHz frame rate ensures both detailed measurement and a large working space. Experimental results for closed-loop 3-D motion control of Paramecium cells trapped within a small 3-D region demonstrate the possibility of using microorganisms as micromachines.
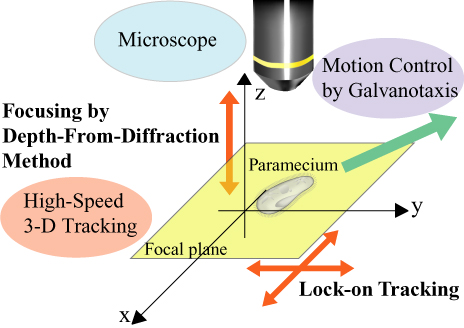
Fig.1. The concept of motion control of microorganisms in 3-D space.
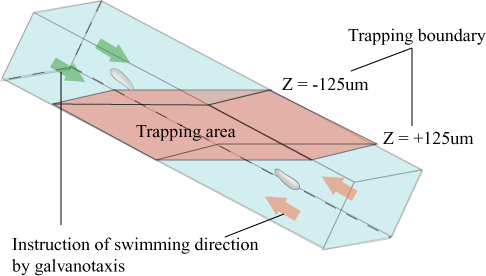
Fig.2. Trapping task.
Results
Movie from CCD attached to microscope, and reconstructed
3-D trajectory of microorganism.
Microorganism is trapped within trapping area.
References (in Japanese)
- Takeshi Hasegawa, Naoko Ogawa, Hiromasa Oku, and Masatoshi Ishikawa. Motion Control of Microorganism using High-Speed 3-D Tracking System. The 25th Annual Conference of the Robotics Society of Japan (Chiba, Japan, 14 Sept. 2007) / Proceedings, 2D12, Sept. 2007. [PDF(553KB)]
- Takeshi Hasegawa, Naoko Ogawa, Hiromasa Oku, and Masatoshi Ishikawa. Observation of Microorganism Galvanotaxis using High-speed Three-dimensional Tracking System. 2007 JSME Conference on Robotics and Mechatronics (Robomec 2007) (Akita, Japan, 12 May 2007) / Proceedings, 2A2-O06, May 2007. [PDF(656K)] [Video(2.9M)]