


Fast peg-and-hole alignment using visual compliance
Summary
We presents a visual compliance strategy to deal with the problem of fast peg-and-hole alignment with large position and attitude uncertainty.
With the use of visual compliance and adoption of a light-weight 3-DOF active peg, decoupled alignment for position and attitude is realized. The active peg is capable of high-speed motion and with less dynamic defects than a traditional robot arm. Two high-speed cameras, one configured as eye-in-hand and the other as eyeto- hand are adopted to provide with the task-space feedback. Visual constraints for effecting the visual compliant motion are analyzed. Alignment experiments show that peg-and-hole alignment with the proposed approach could be successfully realized with robust convergence, and on average, the alignment could be realized within 0.7 s in our experimental setting.
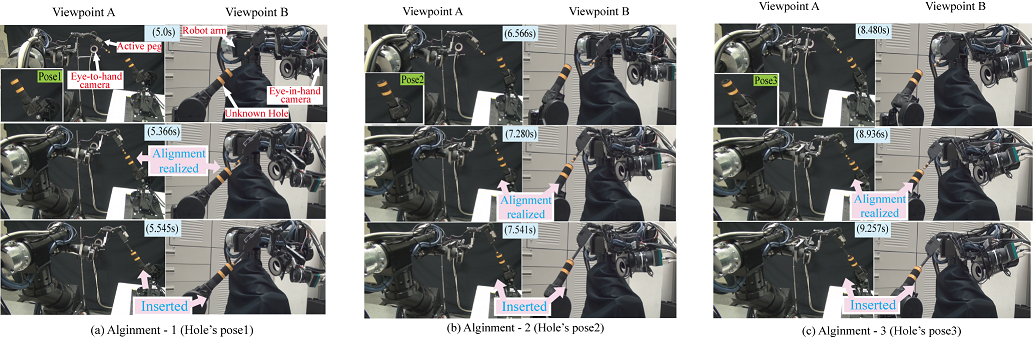
Alignment process
Movie
If you want to use the original video, please send an e-mail for copyright permission to contact .
Reference
- Shouren Huang, Kenichi Murakami, Yuji Yamakawa, Taku Senoo and Masatoshi Ishikawa:Fast Peg-and-Hole Alignment Using Visual Compliance,2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'13)(Tokyo,2013.11.04) /Proceedings, pp.286-292