


Home >
Sensor Fusion >
Target Tracking Behind Occlusions Using a Networked High-Speed Vision System
Target Tracking Behind Occlusions Using a Networked High-Speed Vision System
Summary
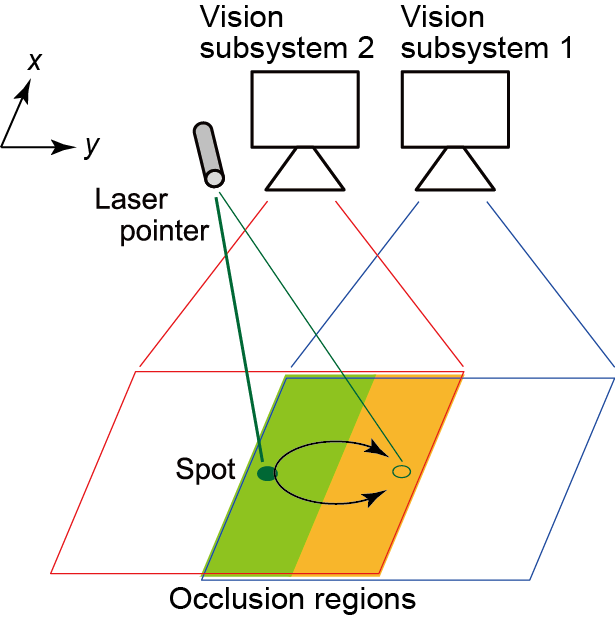
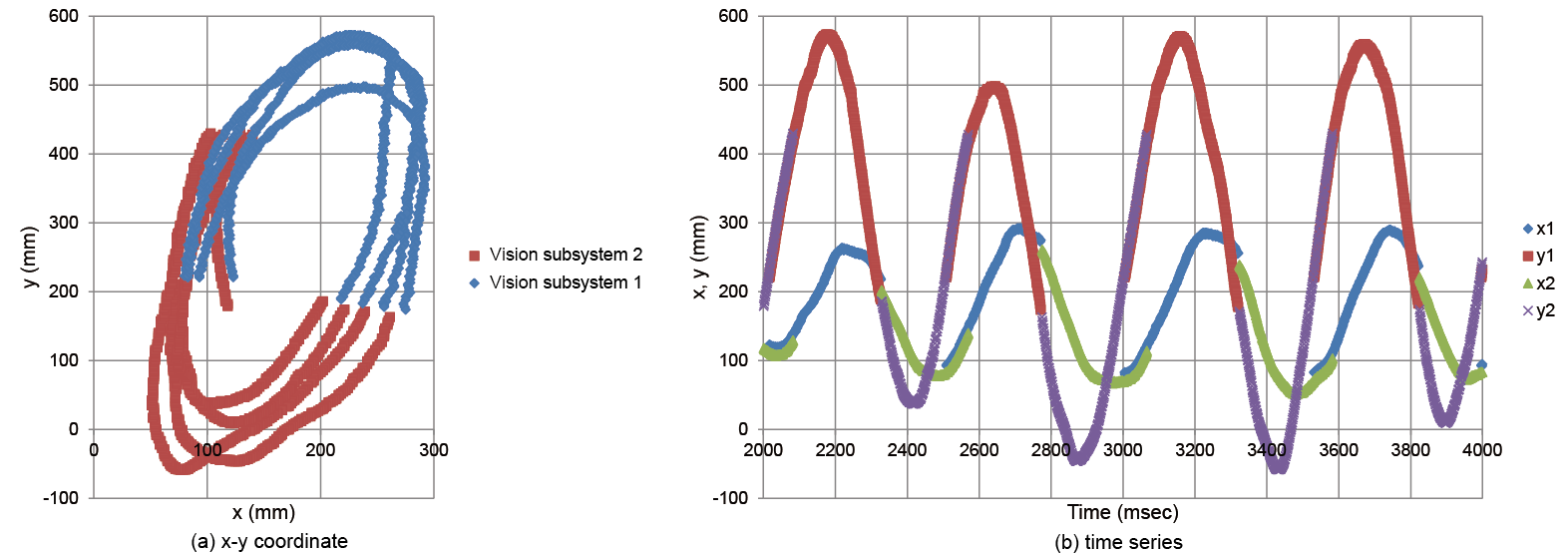
This research is concerned with robust target tracking of a high-speed moving object using a networked high-speed vision system. We discuss the occlusion problem faced in the field of computer vision, and we propose a simple tracking method that exploits the high performance of the networked vision system. Using the proposed method, we performed high-speed and robust target tracking behind an occlusion. Then we could obtain continuous, seamless tracking data every 1-millisecond under the environment with the occlusion. As a result, we confirmed the validity of the proposed method.
Reference
- Akihito Noda, Yuji Yamakawa and Masatoshi Ishikawa: Target Tracking Behind Occlusions Using a Networked High-Speed Vision System, IEEE SENSORS 2014, pp.2018-2021 (2014)