


Home >
Sensor Fusion >
Adaptive Visual Shock Absorber with Magslider
Adaptive Visual Shock Absorber with Magslider
Summary
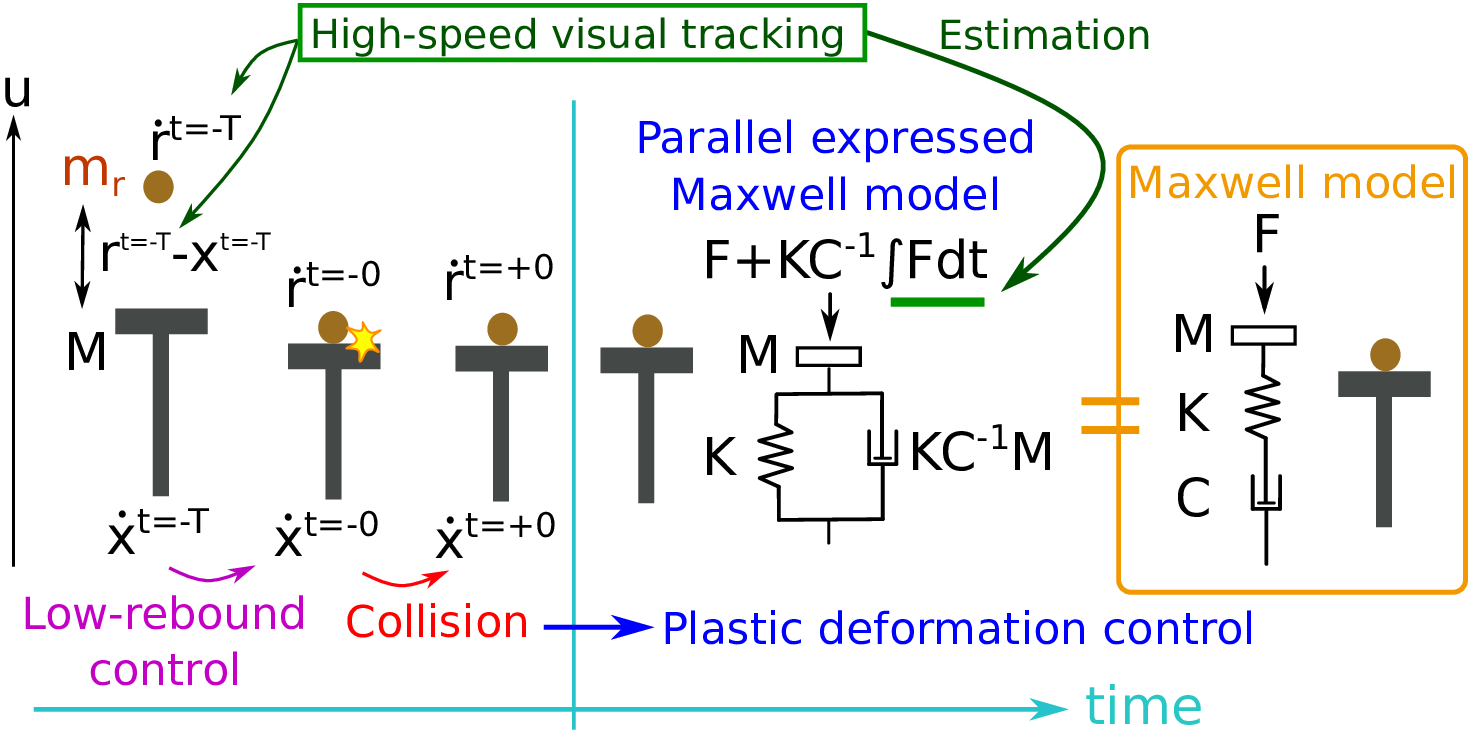
In this study, a visual shock absorber capable of adapting to free-fall objects with various weights and speeds is designed and realized. An experiment was conducted for the receiving of balls in free-fall and the adaptive shock absorber succeeded in adaptively receiving the light wood ball with different velocities. To realize an adaptive visual shock absorber, the framework using three elements were developed.
- Visual low-rebound control using 1000 Hz high-speed visual object tracking for the object non-contact state;
- High backdrivability of the magnetic gear for the moment of object contact;
- Plastic deformation control of a parallel-expressed Maxwell model for the object contact state.
Visual low-rebound control
We implemented low-rebound control using 1000 Hz high-speed visual object tracking. 1000 Hz high-speed visual object tracking was used for preparation with position and velocity control in the object non-contact state. Calculating the 3D position of an object using 1000Hz high-speed image processing with larger time density sensing, the control suppresses the object repulsion before an impact to reduce the relative velocity between the end effector and the object.
Magnetic gear
The main contribution of this study is visual-based low-rebound control and plastic deformation control that is integrated with the high backdrivability of the magnetic gear. The magnetic gear can absorb passively shock in the moment of contact, which is difficult for traditional feedback control to deal with. The magnetic gear allows the seamless transfer of control from the non-contact state to the contact state. In this study, we designed Magslider, linear mechanism with a magnetic gear as shown in the figure.
Plastic deformation control
We developed visual-based plastic deformation control based on a parallel-expressed Maxwell model using estimation of impact force integral term with high-speed image processing. The parallel-expressed Maxwell model is transformed from the Maxwell model, which connects a spring and a damper in series if the viscosity term is transformed and the integral term of the external force is added.
concept
control strategy
Reference
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, and Masatoshi Ishikawa: Adaptive Visual Shock Absorber with Visual-based Maxwell Model Using Magnetic Gear, The 2020 International Conference on Robotics and Automation (ICRA2020) (Paris, 2020.06.02), Proceedings, pp. 6163-6168.