


Home >
Sensor Fusion >
High-speed Hitting Grasping with Magripper
High-speed Hitting Grasping with Magripper
Summary
In this study, Magripper, a highly backdrivable gripper, and hitting grasping, high-speed grasping framework, are developed to achieve high-speed hitting grasping executed seamlessly from reaching. The gripper is designed to achieve both high speediness and environmental adaptability. To realize high-speed hitting grasping with Magripper, the framework using three elements were developed.
- Designed Magripper, a highly backdrivable gripper;
- Implemented deformation control based the Zener model in Magripper;
- Proposed the concept of hitting grasping using Magripper.
Magripper
We introduce a magnetic gear and developed Magripper, a highly backdrivable 1-actuator gripper, to achieve both high speed and environmental adaptability. Backdrivability and high-speed operation at the moment of contact are realized by using a DD-motor, the magnetic gear, and link mechanism. Magripper is composed of one actuator and can be fabricated at relatively low cost, making it suitable for factory automation applications.
Implementation of deformation control based the Zener model
We implemented deformation control based the Zener model in Magripper as backdrive control and improve its adaptability to dynamic manipulation. By mounting the Zener model, which can switch between the Maxwell model and Voigt model with parameters, on the gripper, we successfully achieved both grasping task and adaptability to environment with higher backdrivability.
Hitting grasping
We proposed the concept of hitting grasping using Magripper, which is grasping manipulation with hitting of the environment and objects, and experimentally demonstrate its implementation in a high-speed robot system. Overall, seamless reaching and fast grasping on the assumption of hitting objects and the environment are achieved. In this manner, a different approach from the static and quasi-static approaches to avoid hitting environment could be used. In the experiments, Magripper dynamically and robustly grasped a wood block, a wood cylinder, and a plastic coin with the same strategy and same parameters. In addition, the high-speed roulette betting task was achieved as a demonstration within 1 s. In particular, coin grasping with high-speed movement is an extremely difficult task because collisions with environmental objects such as the floor and desk are likely, and the robot may break. These could be achieved using only servo control via only encoder information without image processing, tactile sensors, or proximity sensors.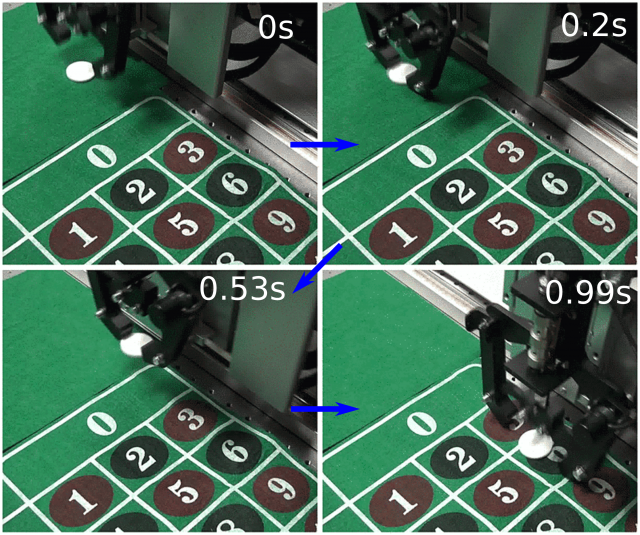
Experimental snapshots
Reference
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. 9137 - 9143.
[2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award]