


Dynamic Human-Robot Interactive System
Summary
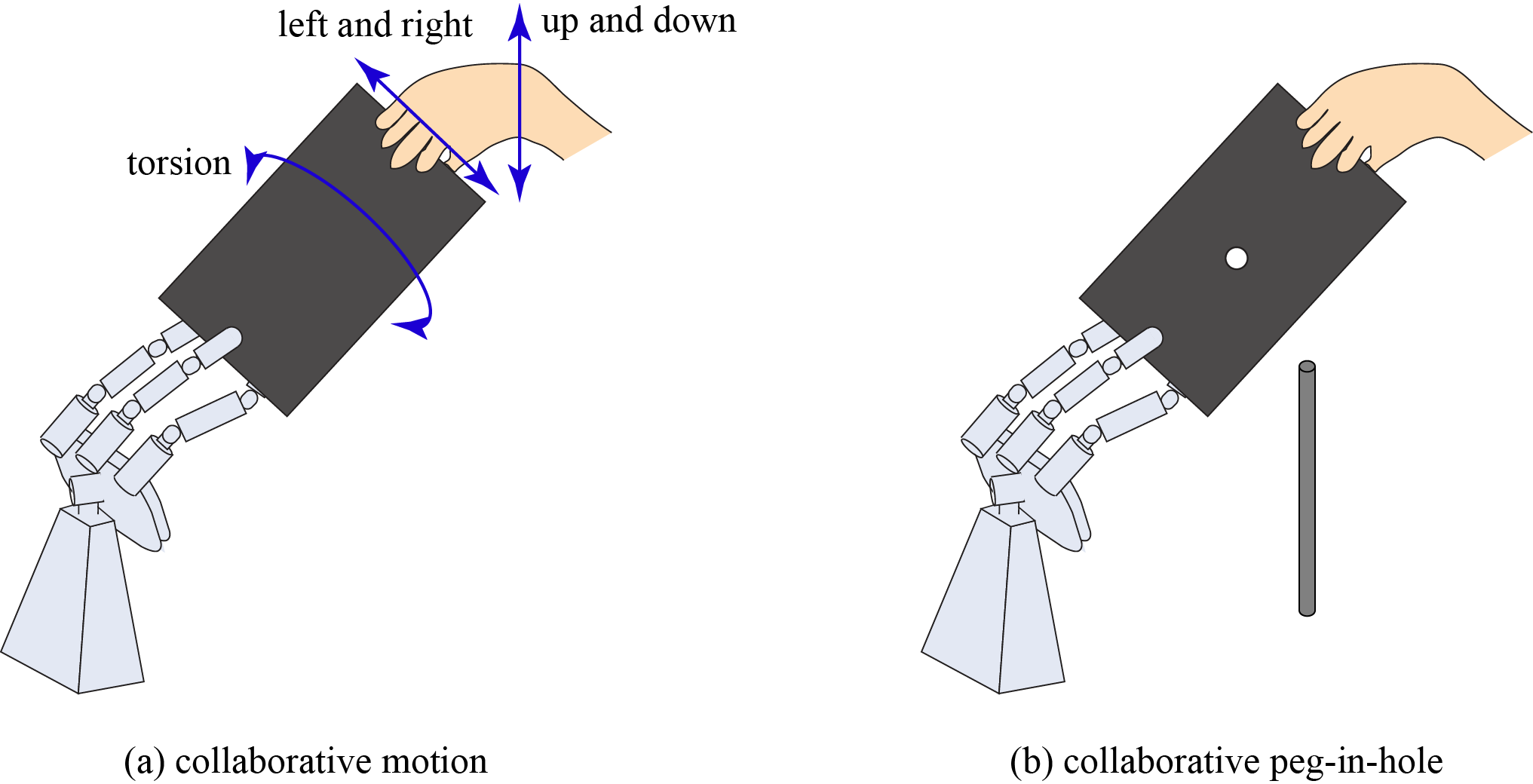
In this research, we developed a dynamic human-robot interactive system which can adapt to a human operation at high speed and low delay, using a high-speed robot hand system consisting of a high-speed vision system and a high-speed robot hand. Then, the human operator and the robot hand grasped the same object, enabled cooperative motion according to the human operations (Figure (a)), and realized a highly accurate peg-in-hole while keeping collaborative motion (Figure (b)).
As the proposed concrete method, by tracking the markers attached on the same object by the high-speed vision system, we recognized the three-dimensional position and orientation of the board to be manipulated by the human operator every 1 millisecond. Based on the visual recognition result, the cooperative motion according to the human motion was realized. Here, it is a feature of this result that utilizing the high-speed performance of the robot system realizes it only by kinematics calculation without performing complex dynamics calculation.
Video
If you want to use the original video, please send an e-mail for copyright permission to contact .