


Dynamic Manipulation of a Linear Flexible Object with a High-speed Robot Arm
Summary
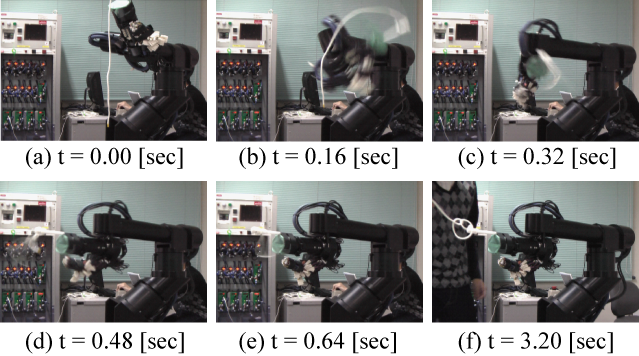
Considering the manipulation from the viewpoint of target object and manipulation method, the static manipulation of a rigid body or a flexible object and the dynamic manipulation of a rigid body have been achieved. And, the suitable strategies and control methods about these manipulations are proposed. However, the dynamic manipulation of a flexible object has not been performed, and the strategy and the control method has not also been suggested. So, this research performs the dynamic manipulation of a linear flexible object by a high-speed robot arm. As an example, the dynamic knotting of a flexible rope is achieved.
The motion of the high-speed robot arm is extracted by analyzing the dynamic knotting by a human. Until now, the model of the flexible object is described by distributed parameter system or ordinary differential equation based on the multi-link model. These models are extremely complex and depend on the model parameter. Thus, we consider that these models are not effective for the motion planning and the proposition of the control method. In this research, we show that the model can be described by the algebraical relation from the robot trajectory during the high-speed robot motion. Moreover, the robot arm trajectory can be obtained from the rope state by using the proposed model. And, the proposed model is not more complex than the typical model. Therefore, we expect that the control of the flexible object will be more simple by using the high-speed motion.
Movies
References
- Y. Yamakawa, A. Namiki and M. Ishikawa: Dynamic Manipulation of a Linear Flexible Object by a High-speed Robot Arm, 2009 JSME Conference on Robotics and Mechatronics, 2A2-G07 (2009)
- Y. Yamakawa, A. Namiki and M. Ishikawa: Dynamic Knotting of a Flexible Rope by a High-speed Arm, 10th SICE System Integration Division Annual Conference (SI2009), pp. 1227/1228 (2009)
- Y. Yamakawa, A. Namiki and M. Ishikawa: Knotting Manipulation based on Skill Synthesis with Consideration of a Multifingered Hand Motion, 15th Robotics Symposia, pp. 114/119 (2010)
- Y. Yamakawa, A. Namiki and M. Ishikawa : Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm, 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems/ pp. 49-54 (2010)