
Real-time Shape Measurement of a Moving/Deforming Object
We have described a time-sequential highframe-rate shape measurement system
for moving and deforming objects. The system is based on multi-spot projection
measurement in a single image using a high-speed vision with a co-processor for
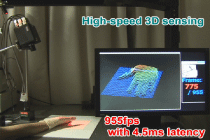
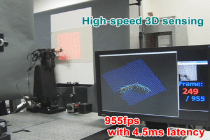
numerous-point analysis. We demonstrated a throughput of 955 fps and a latency of
4.5 ms. Experimental results for three kinds of objects showed that the objects
were measured correctly.
This type of measurement system is expected to find uses particularly in feedback
applications such as robotic manipulation, automoblie application,
surgery support, inspection, human-machine interfaces, and so on.
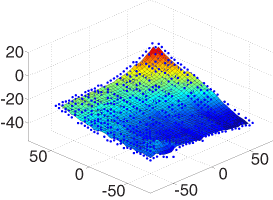
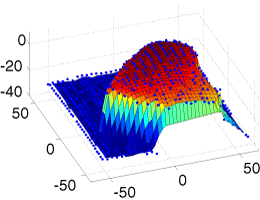
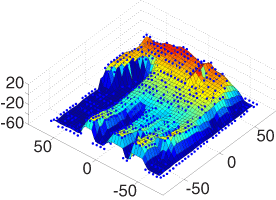
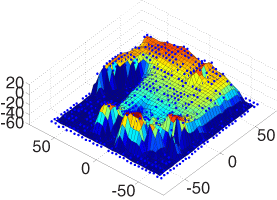
The below figures show time sequential measurement results.
In those figures, the points show three-dimensional points of the measrued spots.
The estimated surface is also plotted.
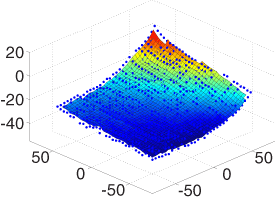
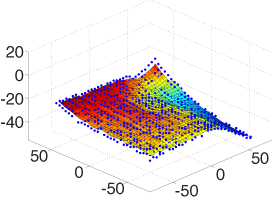
Waving Flag [mm]
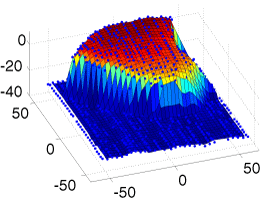
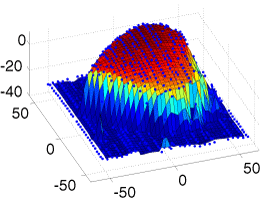
Flying Heart-shape Body [mm]
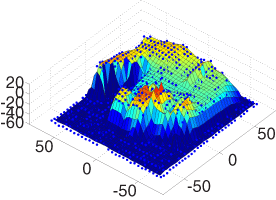
Moving Hand [mm]
Movie
- Demonstrated Movie [wmv 10.1MB]
- Other Demonstrations
References
- Yoshihiro Watanabe, Takashi Komuro, and Masatoshi Ishikawa: 955-Fps Real-Time Shape Measurement of a Moving/Deforming Object Using High-Speed Vision for Numerous-Point Analysis, 2007 IEEE International Conference on Robotics and Automation (ICRA'07) (Roma, 2007.4.11) / Proceedings, pp. 3192-3197. [PDF] *IEEE