


ハプティカー:ハプティックレーダーの自動車への応用
概要
この研究は ハプティックレーダー プロジェクトを拡張及び補完した研究といえる。 ハプティックレーダーの研究目標は、見えない障害物に対する個人の空間知を、 体の外側に向けて拡張された敏感な「光の触角」で、拡げることにあり、 目で見えない領域に対しても視覚が拡張されることにあった。 本ハプティカーシステムの実験装置は、センサーを表面に載せた車と、 体にアクチュエイターを付けた運転手から成る。 この方法で、運転手は車の周りにあるものを感じることが出来る。 たとえば、車からの死角に潜む障害物の存在を、 頭の後ろ側にあるアクチュエイターからの不快な刺激によって感知することが可能となる。
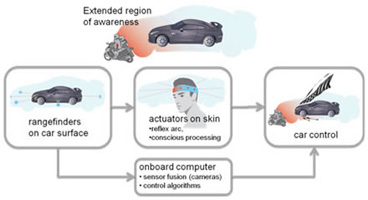
右の図はハプティカーのインタラクションモデルであり、 新しいセンサー・モーターループを表す。 車の表面の距離センサーは障害物を検知することに用いられ、 その情報は、必要なときには自動的にハンドルを切ることに役立つ(右の図における下側の経路)。 また、距離情報によって運転手の頭の周囲に配置された小さなモーター振動子が動き出し、 運転手が車内にいるときのみならず、遠隔操作する際にも車にいる感覚で操作することを可能とする。 (右の図における上側の経路)
我々はこのコンセプトの下、2009年にラジコンカーの制作及び展示を行った。 運転手はミニチュアカーの周囲の様子を、 ウェアラブルのヘッドセットに付けられたモーター振動子を通じて、 コンピューターの制御画面の前にいる限り、空間知の拡張として"感じる"ことが可能である。 また、車には小さなカメラが実装されており、 運転手の正面のコンピューターでライブビデオストリーミングを見ることが出来る。 こうした機器構成は、本物の運転環境をハプティカーによって模倣しているといえる。 (視触覚情報の一体化の実現)



動画
参考文献
- A. Cassinelli, Alexis Zerroug and M. Ishikawa, Haptic Radar and HaptiKar, exhibited at LAVAL VIRTUAL 2009, 22-26 April 2009.