


ホーム >
センサ フュージョン >
DOC Handによるリング・シャフト部品の高速組立
DOC Handによるリング・シャフト部品の高速組立
概要
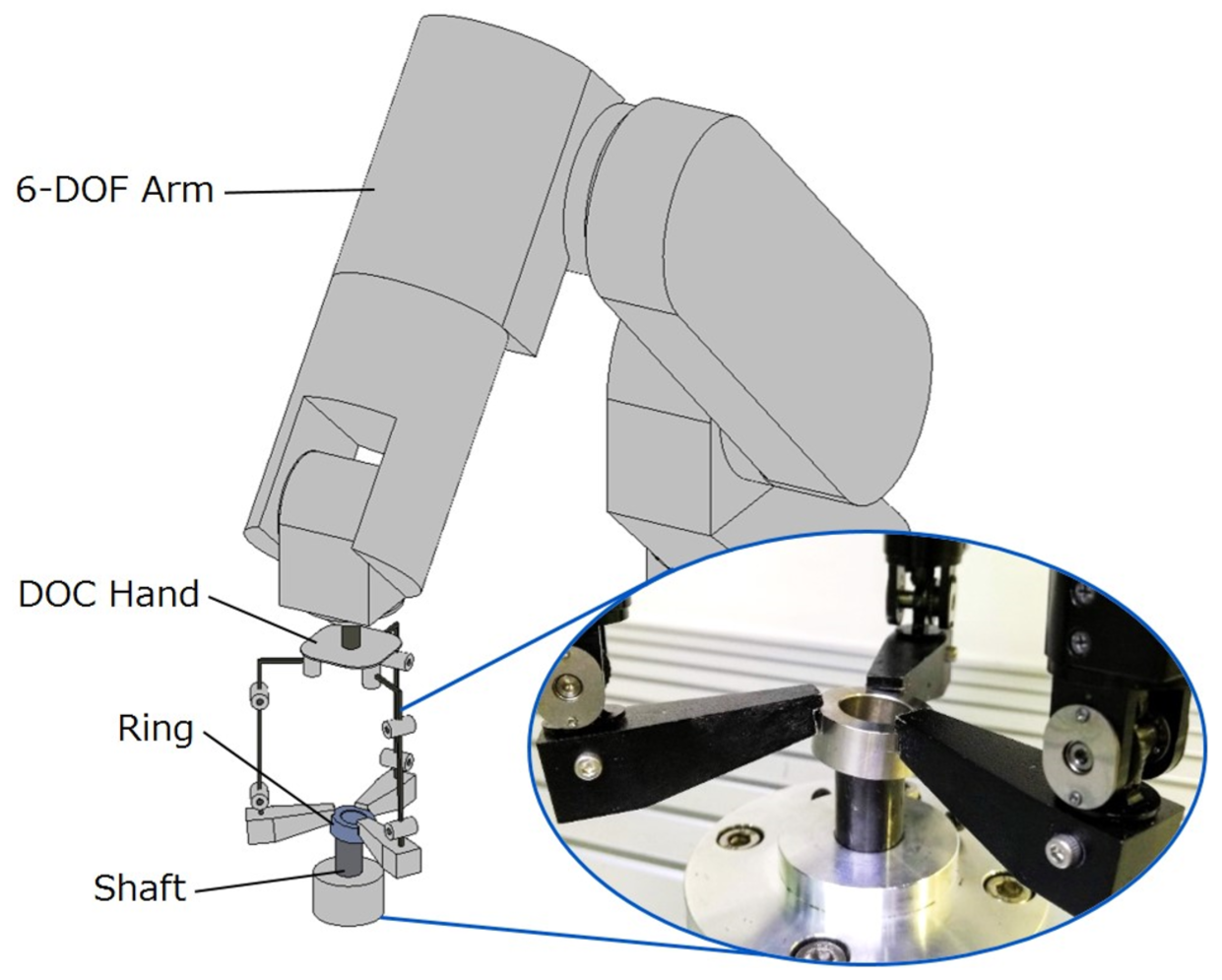
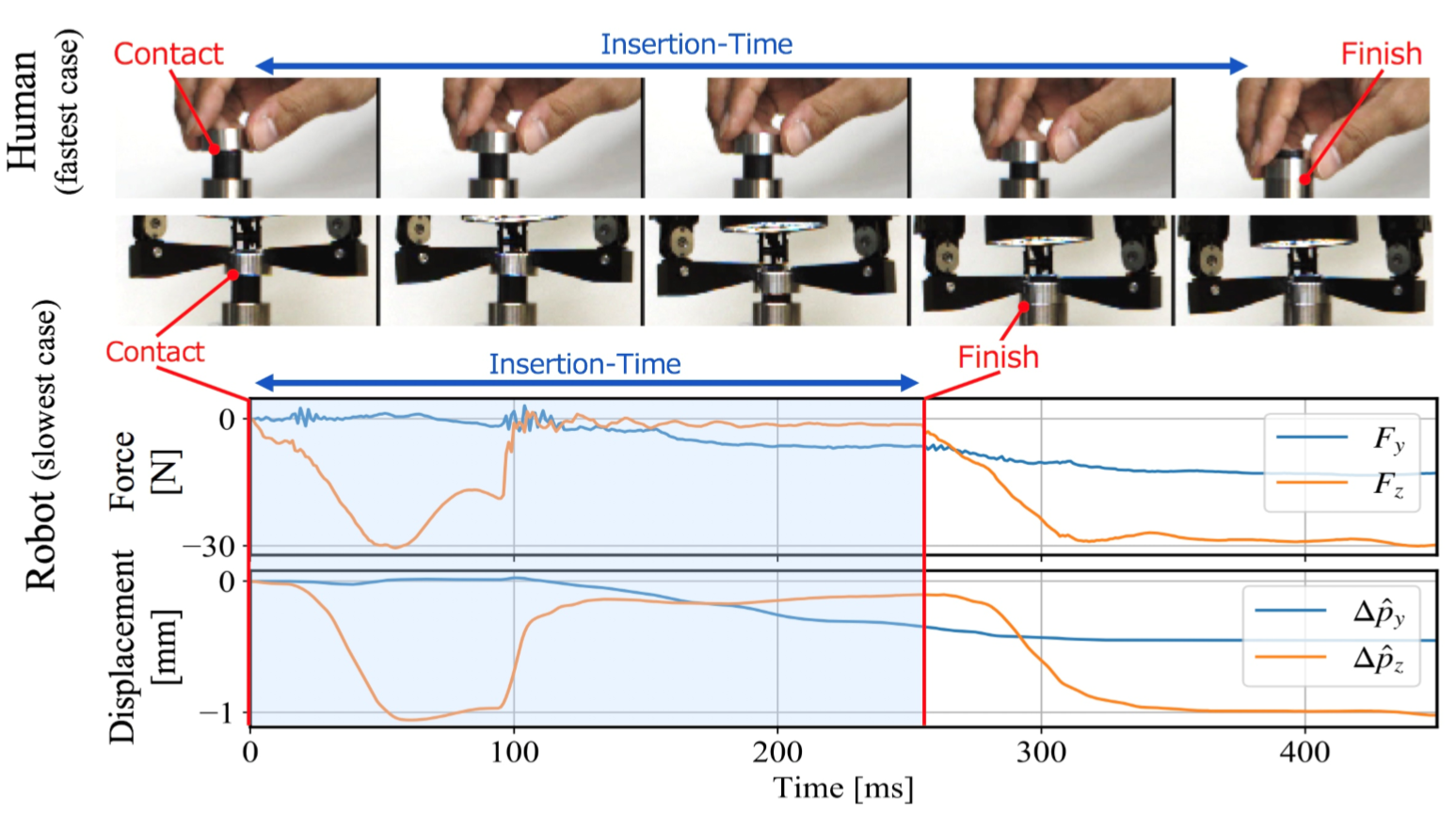
当研究室で開発している「軽量高速多指ハンドシステム」 の応用例として,リング・シャフト部品の高速組立を実現しました. 部品間のクリアランスは0-36マイクロメートルと極端に狭く,人間でも挿入完了までに2.58秒の時間を要します. 一方,我々が提案した挿入戦略"Dynamic Observable Contact (DOC) hand"を用いることで,人間よりも早い2.42秒での組立を実現しました. DOC handは,1ms周期での各指各関節の剛性制御と,アーム手先速度制御を行うことで, 部品同士が接触した際の衝撃力吸収と,挿入位置誤差の修正を実現する戦略です.
上記は,東京大学 石川・グループ研究室とオムロンとの共同研究の成果です.
|
|
動画
動画の原本もございます.使用許諾は,contactまでご連絡下さい.
参考文献
- Yukihisa Karako, Shinji Kawakami, Keisuke Koyama, Makoto Shimojo, Taku Senoo, Masatoshi Ishikawa: High-Speed Ring Insertion by Dynamic Observable Contact Hand, IEEE International Conference on Robotics and Automation (ICRA2019), (Montreal, Canada, 2019.5.20)/Proceedings, pp., 2019.