


ホーム >
センサ フュージョン >
磁石歯車グリッパ”Magripper”による高速グラスピング
磁石歯車グリッパ”Magripper”による高速グラスピング
概要
本研究では、バックドライバビリティが高いグリッパ”Magripper”と、リーチングからシームレスに高速グラスピングできるフレームワーク”Hitting Grasping”を開発した。 MagripperによるHitting Graspingを実現するために、3つの要素を併用したフレームワークを開発した。
- バックドライバビリティが高いグリッパ”Magripper”の設計
- Zenerモデルに基づく塑性変形制御の”Magripper”への実装
- Hitting Graspingのコンセプトの提案
Magripper
高速性と環境適応性を両立させるため、磁石歯車を導入することによって、バックドライバビリティの高い1アクチュエータグリッパを実現した。 Magripperはダイレクトドライブモータ、マグネットギア、リンク機構により、object接触時のバックドライブ性と高速動作の両立を実現した。 Magripperは1つのアクチュエータで構成されていて、比較的低コストで製造できるため、FA利用に適したグリッパである。
Zenerモデル塑性変形制御の”Magripper”への実装
“Magripper”においては、磁石歯車によるハードウェア的なバックドライバビティの向上だけでなく、制御によるバックドライバビティ向上も実現した。 Zenerモデルに基づく変形制御をバックドライブ制御として”Magripper”に実装し、ダイナミックマニピュレーションへの適応性を向上させた。 MaxwellモデルとVoigtモデルをパラメトリックにモデルを切り替えることで、グリッパのグラスピングタスクとobjectから受ける衝撃の吸収能力の両方を実現した。
Hitting Grasping
“Magripper”の高いバックドライバビティ性能を活かし、 机や床などの環境やobjectにぶつかりながらグラスピングする、高速グラスピングのフレームワークの提案を行い、高速ロボットシステムに実装し実験を行った。 物体や環境に当たることを前提としたシームレスなリーチングと高速なグラスピングは、環境への衝突を回避するための静的および準静的アプローチとは異なるアプローチである。 実験においては複数のオブジェクトに対して”Hitting Grasping”を同じパラメータにおいて高速グラスピングを行い、デモンストレーションとしてカジノルーレットのベッティングタスクを高速に達成した。 特に硬貨のような薄いオブジェクトのグラスピングは、床や机などの環境物との衝突が発生しやすく、ロボットが破損する可能性があるため、非常に困難な作業である。 本実験においては画像処理・触覚センサ・近接覚センサを使用しておらず、エンコーダのみを用いたサーボ制御を使用して実現している。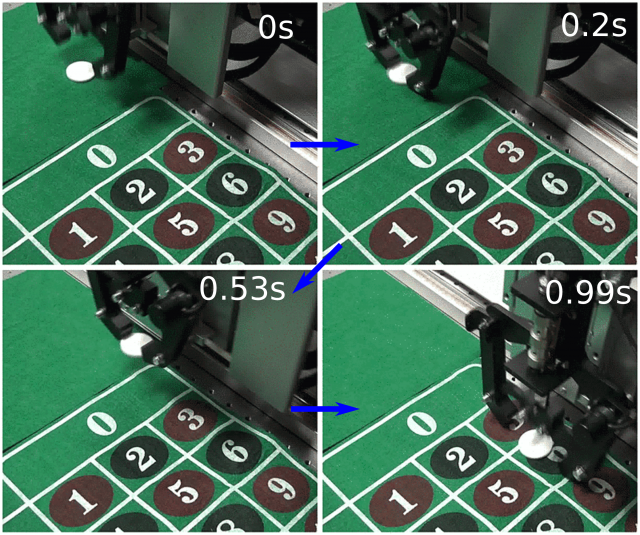
Experimental snapshots
参考文献
- Satoshi Tanaka, Keisuke Koyama, Taku Senoo, Makoto Shimojo, and Masatoshi Ishikawa: High-speed Hitting Grasping with Magripper, a Highly Backdrivable Gripper using Magnetic Gear and Plastic Deformation Control, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020) (Las Vegas, 2020.10.25-29), Proceedings, pp. 9137 - 9143.
[2020 IEEE Robotics and Automation Society Japan Joint Chapter Young Award]