


ホーム >
センサ フュージョン > 高速アームを用いた動的な線状柔軟物体の操り
高速アームを用いた動的な線状柔軟物体の操り
概要
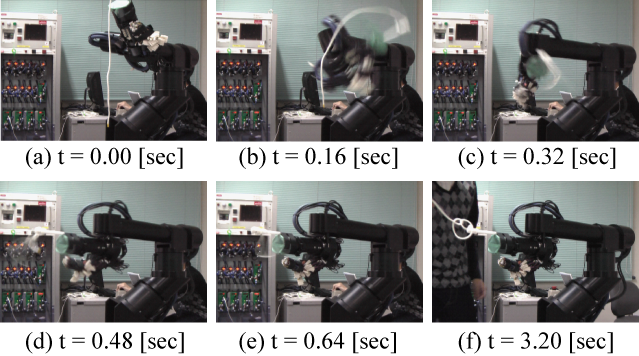
マニピュレーションを対象物体と操り手法の観点から考察すると, これまでに剛体の静的・動的マニピュレーションや柔軟物体の静的マニピュレーションが実現されてきた. これらのマニピュレーションについては,適切な戦略もしくは制御手法が提案されてきた. しかしながら,柔軟物体の動的マニピュレーションは実現されておらず, 適切な戦略や制御手法も提案されていない. そこで本研究では,高速アームを用いた線状柔軟物体の動的マニピュレーションを行う. その一例として,柔軟紐のダイナミックな紐結び操作の実現を目指す.
高速アームの軌道に,人間による紐結びを解析し,動作を抽出し,その運動を実装している. これまで柔軟物体のモデルは,分布定数系で表現されたモデルや柔軟物体を多リンク系と仮定し, 微分方程式で表現したモデルなどで記述されてきた.これらのモデルは複雑で, モデルパラメータに大きく依存し,軌道生成や制御手法の提案に有効であるとは言い難い. そこで本研究では,ロボットの高速性を利用することで, ロボットの運動から幾何学的な表現(代数方程式)で柔軟物体をモデル化できることを示している. そして,提案したモデルを用いて高速アームの軌道の妥当性を検討している. さらに,モデルが代数方程式であることから,紐の形状を指定したときに, その形状からアームの軌道を得ることも可能である. 高速性を利用することで,従来よりも比較的簡単なモデルが得られており, 制御も容易になると期待する.
動画
参考文献
- 山川雄司,並木明夫,石川正俊 : 高速ロボットアームを用いた線状柔軟物体のダイナミックマニピュレーション, ロボティクス・メカトロニクス講演会2009/2A2-G07 (2009)
- 山川雄司,並木明夫,石川正俊 : 高速アームによる柔軟紐のダイナミックな結び操作, 第10回 計測自動制御学会 システムインテグレーション部門講演会/pp. 1227-1228 (2009)
- 山川雄司,並木明夫,石川正俊 : 線状柔軟物体の柔軟性を利用したロボットアームによる高速結び操作, 第15回 ロボティクスシンポジア,pp. 114/119 (2010)
- Y. Yamakawa, A. Namiki and M. Ishikawa : Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm, 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems/ pp. 49-54 (2010)